A space tug is a tiny spacecraft with over-sized engines and some means of grappling another spacecraft. If the tug pushes its cargo,it will have a massive push plate on its bow, with a core of structural members to transmit the thrust of its engines to the push plate. If the tug pulls its cargo, it will have cables and winches on its stern, and the engines will be vectored to fire backwards at an angle so it does not torch the ship it is dragging. The engines will suffer a reduction thrust penality proportional to the cosine of the engine angle.
Note that if nuclear propulsion spacecraft are involved, the tugs and the spacecraft will generally be designed to dock bow to bow. Otherwise you will be exposing the other ship to the radiation from your engine.
According to the Technovelgy site, the term "space tug" was invented in 1942 by Eric Frank Russell in his short story "Describe a Circle"
Martin Marietta Corporation click for larger image
detail
detail
THE LAST GREAT WAR
(ed note: Nuclear Salt Water powered Frigate New Jersey wants to dock with colony on asteroid 624 Hektor. Nuclear Lightbulb powered Tug Brutus assists. Remember, with nuclear drive rockets using shadow shields the only safe way to dock is nose-to-nose.)
"Conn, tug Brutus requests permission to dock."
"Permission granted. Close the fuel valves."
As New Jersey shut down her main engine, the powder blue UN tug approached on thrusters. Fitzthomas watched on external cameras, never liking it when his ship was in others' hands, but powerless to do anything about it. The traffic rules within 100 k-klicks of Hektor were as plain and draconian as those of LEO: no unauthorized burns, and no open cycle nuclear reactors in operation under any circumstances. And the UN tug drivers were pretty good.
"Conn, Brutus is making her final approach. Docking in one minute."
"XO (executive officer), signal all hands."
"Aye sir." A moment later, Allen's voice came over the shipwide intercom. "All hands, prepare for ship to ship dock." He switched back to his private channel to the captain. "Let's hope whatever blue hat is driving that donkey cart knows how to actually fly a spaceship."
As it turned out, he could. Brutus and New Jersey touched nose to nose at barely a meter per second. Heavy duty docking latches locked the ships together, and Brutus extended a fiber optic probe into a receptacle inside New Jersey's docking ring.
"Conn, we have hard dock with Brutus. They are requesting propulsion access."
Fitzthomas removed a hard blue plastic key from his extensive key ring and inserted it into a blue lock. "Transferring propulsion access on my mark....mark." He turned the key and the clear plastic ring around the lock lit up blue. Brutus's pilot now had control over New Jersey's maneuvering thrusters. For the duration of the ride, Fitzthomas's hand would hover over the key, ready to cut Brutus out of the system, just in case.
Brutus's pilot could now also see what New Jersey's docking radar and aft cameras saw, a necessity since the bulk of the frigate would block the tug's line of sight—visual or otherwise—while they maneuvered. Brutus was little more than a nuclear engine (closed cycle, which meant no reactant could escape with the exhaust, at the cost of about half the ship's specific impulse, which didn't matter for a short range, low speed tugboat) with a sturdy docking ring and a cockpit jammed in between. In some operations, the tug was unmanned and guided by computer or radio control operator until it docked with the target ship, and then the tug would relinquish control of its systems to the target ship's pilot, or a harbor pilot brought on board for the purpose, saving some of the mass of reactor shielding for the cockpit and some of the ulcers for shipmasters, but the UN insisted on doing things the old fashioned way. Fitzthomas had heard of tugs which did the entire trip by remote control or onboard computer, but he'd rot in hell before he let some toe-picker play model airplane with his spaceship, and the United States Space Guard agreed.
New Jersey's thrusters fired, heeling the ship around 180 degrees, so that her bow, with the tug latched on, faced Hektor. Brutus then fired her main engine, continuing the deceleration burn New Jersey had started. Fitzthomas felt himself lift ever so slightly out of his chair. His ship's decks were aligned so "down" when they were under thrust was towards her main engine. With Brutus docked with her nose and her thruster pointing the other way, "down" was now, temporarily, in the direction of the overhead. One more thing for Fitzthomas not to like about the tugboat.
"Approaching Hammarskjöld docks. Ten minutes to docking."
The Boeing Space Tug is a modular design. This concept was later developed into the NASA Space Tug. One way to tell the difference is that the Boeing tug's crew and cargo modules were spherical, while the NASA tug's modules were cylindrical.
The information presented here is primarily from the Boeing Company Aerospace Group report Pre-Phase A Technical Study For Use Of Sat V, Int 21 & Other Sat V Derivatives To Determine An Optimum Fourth Stage (Space Tug). Specifically from Volume I Book III, and Volume II.
Note how the RCS clusters around the waist are inset into the hull. All modules have to fit into a space shuttle cargo bay, the RSC clusters cannot stick out.
Modules were designed to fit in Space Shuttle cargo bay. Study assumes a space shuttle payload capacity of 24,500 kilograms delivered to an 180 kilometer orbit at a 28.5° inclination.
Modules are rated to be safely re-used a limited number of times, e.g., the crew module is rated for 10 lunar landings or 100 orbital missions. These are listed with the modules.
After each mission all modules need to be refurbished. This is assumed to cost 3% of the module's first unit cost. After the final use, module can be refurbished to be used once more on an expendable mission. Refurbishment is done in space, unless the tug has exceeded one year of operations in space or is to be used in an expendable mission.
The micrometeoroid and thermal shields are sized for a 14 day orbital mission. Their mass will have to be increased for a 50 day lunar mission, reducing the payload capacity.
The number of reuses the propulsion module is rated for are:
50 uses in a one-way mission with delta V below 8,000 f/s
20 uses in a one-way mission with delta V above 8,000 f/s
20 GEO missions
10 lunar landing missions
50 lunar orbit missions
Medium propulsion module will easily fit in shuttle cargo bay, but if it is loaded with propellant and mated with an astrionics module, it is very close to the shuttle's mass carrying limit.
Large propulsion module will barely fit in space shuttle cargo bay, but if it is loaded with propellant it will exceed the shuttle's mass carrying limit.
Note how the RCS clusters are inset into the hull. If the clusters were on the hull surface, the propulsion module would not fit into the space shuttle cargo bay.
68,000 pound (31,000 kg) large propulsion module click for larger image
45,000 pound (18,000 kg) medium propulsion module click for larger image
45,000 pound (18,000 kg) medium propulsion module click for larger image
45,000 pound (18,000 kg) medium propulsion module click for larger image
20,000 pound (9,100 kg) small propulsion module (secondary propulsion) click for larger image
20,000 pound (9,100 kg) small propulsion module (secondary propulsion) click for larger image
20,000 pound (9,100 kg) small propulsion module (secondary propulsion) click for larger image
Manipulator arms display and controls, maintenance equipment, etc.
Expendables
RCS propellant, fuel cell reactants, etc.
Re-use
The crew module is rated for 10 uses in a lunar landing mission, and 100 uses for LEO or GEO missions.
Normal operation (3 crew for 50 days) click for larger image
Normal operation (3 crew for 50 days) click for larger image
Shuttle operation (15 crew for 2 days) click for larger image
Shuttle operation (15 crew for 2 days) click for larger image
click for larger image
click for larger image
Airlock
Note this is also the storm cellar click for larger image
Astrionics
The astrionics module is 4.3 meters across and 1.2 meters high. Mass varies from 857 kg to 1503 kg, depending on mission (see image below). The structure is
octagonal with eight load bearing columns for transfer of the loads between
the propulsion module and that portion of the Space Tug above the astrionics
module. The systems listed on the bottom of the figure are mounted
on the eight component mounting panels. These panels are accessible from
both the inside and outside of the astrionics module. Radiator/louver doors
provide thermal control as well as cover and protect the component mounting
panels.
click for larger image
click for larger image
The number of reuses the astrionics module is rated for are:
50 uses in a one-way mission with delta V below 8,000 f/s
20 uses in a one-way mission with delta V above 8,000 f/s
20 GEO missions
10 lunar landing missions
50 lunar orbit missions
click for larger image
click for larger image
Cargo
Cargo modules are used to carry multiple low volume packages. If the cargo is in one large single piece (e.g., a satellite), it does not need no steeking cargo module. Instead it will be designed to withstand the mission environment, equipped with a payload adaptor, and attached bare naked to the payload adaptor on the nose of the space tug.
Cargo modules come in two types: Round and Doughnut. Round are mounted on the top of tug while doughnut are mounted at the bottom (encircling the rocket engine). Round are used for orbital missions and doughnut are used for lunar landing missions. This is because it is almost impossible to lower the round module's cargo 13+ meters down to the lunar surface. The doughnut cargo module will be about 1.5 meters from the lunar surface.
Cargo modules click for larger image
Cargo Modules
Round
Doughnut
Payload Capacity
9,072 kg
4,536 kg
Volume
36 m3
28 m3
Mass
1,316 kg
2,038 kg
Round module is one piece constrution with two exits.
Doughnut module is two half doughnut construction with two connecting hatches 180° apart plus exit hatch to surface. This is because the assembled doughnut is too big to fit in the space shuttle cargo bay, so it was split in two.
Round modules are basically hollow crew modules. They have a
cargo capacity of 9,072 kg and a volume of 36 m3. The
empty module has a mass of 1,316 kg. Only those minimum electrical, instrumentation,
and environmental control systems as required to maintain
the cargo are provided. The cargo modules will be provided with racks arid
other bracketry to house the small packages which are envisioned for delivery
as cargo to the space station or to low earth orbit. Packages are 0.3m × 0.3m × 0.6m. Liquids will be housed
in the lower ellipsoidal section of the cargo module.
Round Module
Note gas/liquid storage in the base click for larger image
Round module plan layout of cargo click for larger image
As previously mentioned, the doughnut module is for lunar landing missions. The idea is to get the module as close to the lunar surface as possible, to aid unloading (1.5 m from the lunar surface, instead of 13 m). This means it needs a doughnut hole in the middle to accommodate the rocket engine. Given the cargo requirements, the module will have a diameter too large to fit in the space shuttle's cargo bay. So the module is split into two section.
The doughnut module has a cargo capacity of 4,536 kg and 28 m3. The empty module mass is 2,038 kg, larger than the round module due to being split into two sections.
Doughnut module is at the bottom, encircling the engine. click for larger image
The basic astrionics module will be designed to
accomplish low earth missions. To accomplish other missions, it will
be necessary to provide additional astrionics capability. Plug-in
astrionics will provide this capability. The kits will consist of additional (1) data management
systems, (2) guidance, navigation and control systems, (3) command
and control systems, (4) electrical power systems and (5) electrical networks.
For the lunar missions, the power requirements for the lunar experiments
will exceed the capability of the standard power supply for the Tug. An
auxiliary power kit will make up the deficit.
This kit will consist of a two kilowatt fuel cell, supporting tankage, lines,
valves, fuel, etc.
For lunar missions, the power kit will be installed inside the doughnut cargo module, for easy access while on the lunar surface. For quiescent mode operations (mothballing) it will be installed in the center of the astrionics module.
CLUSTERING ADAPTER KIT
Clustering adapters will
be required for the large payload synchronous missions where more than
one propulsion module is required for each stage.
Clustering adaptors connect propulsion modules side-by-side instead of one-on-top-of-another as do staging adapters.
DOCKING ADAPTOR / PAYLOAD ADAPTOR KIT (DA)
Docking Adaptors and Payload Adaptors are basically the same unit. They are called "docking" for crewed tugs and "payload" for uncrewed tugs. As payload adaptors they are used to mount a monolithic playload (i.e., not suited for a cargo module) atop the astrionics or crew module.
Docking adaptors are rated for 100 uses.
Docking Adaptor Kit
ENVIRONMENTAL PROTECTION SYSTEM KIT
Environmental protection kits are additional micrometeoroid shielding.
The basic Space Tug configuration will
be designed to accomplish the low earth orbit and/or synchronous
missions. For the accomplishment of longer duration missions, environmental
protection kits will be provided which will provide further micrometeoroid
protection capability.
LANDING LEGS KIT (LL)
These allow the tug to land on Luna without toppling over.
A space tug assembled for lunar landing missions is assumed to have a height of about 15.2 m. This height requires the landing legs to extend 9.1 m from the center of the tug to ensure stability.
A landing leg kit has four landing legs, 90° apart, of tubular construction. The legs would be fabricated from Aluminum 7075-T6, with shock absorber system consisting of liquid springs and landing discs to absorb shock and to act as leveling mechanisms. The upper attachment point for the landing legs is approximately 4.6m off the ground at the mid point of the LOX tank. The lower intersection point is approximately even with the lower part of the LOX tank.
Landing legs are rated for 10 uses.
Landing Legs Kit click for larger image
Landing Legs Kit click for larger image
MANIPULATOR ARMS KIT (MA)
The technical term is "waldoes". These are mounted on special fittings on the crew module. Displays and controls are installed in the crew control room.
Manipulator Arms Kit
RADAR KIT
For the lunar landing mission, the basic laser system will
not provide the necessary identification of the landing terrain due to the
dust and other visibility inhibiting environmental effects.
The radar kit
will provide the visibility necessary for the accomplishment of the landing.
RCS BOOSTER KIT
The basic Space Tug configuration is designed to operate in low earth or synchronous orbits.
An RCS booster kit will be required to provide additional maneuvering capability during some of the Space Tug's more complex missions (i.e., lunar landing).
STAGING ADAPTER AND SEPARATION MECHANISM KIT (SASM)
For a "stage-and-one-half" vehicle, you use the SASM to mount a drop tank on top of the tug, to increase the available propellant. Usually the monolithic payload is mounted on top of the drop tank using a payload adaptor. When the tug reaches the specified orbit, both the payload (satellite) and the drop tank are dropped off.
For a full multistage vehicle, you use the SASM to mount an entire second vehicle on top of the first. When the lower stage exhausts its propellant, the SASM provides separation, and the upper stage ignites its rocket.
The staging adapter portion of the kit will consist of
mating conical frustrums at the aft end of the upper module and at the forward
end of the lower module. The upper stage conical frustum will fit into the
lower stage conical frustum. The separation mechanism will consist of an
electrical or hydraulic system to actuate pins to lock (or separate) the two
modules. This kit will be primarily fabricated from Aluminum 7075-T6.
RED: conical frustrum on top of doughnut cargo module GREEN: conical frustrun on bottom of propulsion module BLUE: tabs GOLD: slots for tabs, with locking pins
The studies looked into spacecraft designs capable of performing the above missions. Only some of them pertain to our orbit transport vehicles (OTVs), they are shown in white. The other missions colord blue are for Terra launch systems and lunar/planetary transport systems, we will be ignoring them.
In the High Thrust OTV category, three propulsion systems were examined:
LO2/MMH: liquid oxygen with monomethyl hydrazine, exhaust velocity ≅ 3,630 m/s
Solid-Core NTR:solid core nuclear thermal rocket with liquid hydrogen propellant, exhaust velocity ≅ 7,650 m/s (ideally it would have a Ve of 8,090 m/s, but it is reduced to an effective Ve of 7,650 m/s due to propellant losses for start-up and afterheat removal)
The only reason to use LO2/MMH is because it has an admirably high density. LO2/LH2 has a much better exhaust velocity, but hydrogen is so annoyingly low density that the size of the OTV will be too big to fit into the Space Shuttle's cargo bay.
The OTVs can use various staging methods in order to improve performance, transportability, or operational flexibility.
SINGLE STAGE
Obviously the simplest. There is no staging, the OTV performs the entire mission intact, and returns to LEO for reuse. They are all far to large to be returned to Terra's surface by the Space Shuttle, they will have to be refueled and serviced in LEO. It is not very efficient.
1½ STAGE
This uses a mild version of staging in the form of jettisoned drop tanks. The tanks are not recovered. This does allow the tanks to be sized such that individually they will fit inside the Shuttle's cargo bay. The drawback is that orbital assembly is complex, involving both side-to-side and end-to-end docking.
2 STAGE
This is the conventional form of staging. Stage one is used for delivery and is expendable. Stage two is reusable and returns. The two stages are very different in size with the expendable Stage one being the largest. This has no advantages over Common Staging, so it should be avoided.
COMMON STAGE aka "tandem" or "slingshot"
Both stages are reused, both have equal propellant capability. Stage one expends 90% of its propellant, boosting stage two into an elliptic Terran orbit. Stage one then separates and returns to LEO using its remaining propellant. This typically reduces the delta V required of stage two by 2,000 m/s. The OTVs using MMH fuel were only examined with this form of staging.
MULTISTAGING
This is three or more stages, of different sizes. This was not used for any of the OTVs, just for the planetary missions
Full Mass for LO2/LH2 OTVs click for larger image
Full Mass for LO2/MMH OTVs click for larger image
In the figures above, the missions are outside the parenthesis, and the staging option is inside. For instance OLS (1-½ STG-CORE) is Orbiting Lunar Station mission with 1-½ Staging.
Large Single-Stage LO2/LH2 Orbital Transport Vehicle
Table 1-6. Large Single-Stage LO2/LH2 OTV Weight Details based on Impulse Propellant mass of 230,400 kg
OTV scaled for the Geosynchronous Space Station mission
230,400 kg impulse propellant click for larger image
This design is applicable to the following missions:
Geosynchronous Space Station (GSS)
Independent Lunar Surface Sortie (ILSS)
Orbiting Lunar Station (OLS)
Lunar Surface Base (LSB)
Manned Planetary Exploration (requires clustering and multistaging)
Automated Planetary Exploration (modified mass properties due to unmanned expendable use )
The spacecraft can be sized by using a series of graphs for the Mass Properties Buildup Parametrics. Or so they claim, I question the accuracy of the crude graphs.
Parametric Graphs for Large Single-Stage LO2/LH2 OTV
The problem is to develop the mass properties of a Large single-stage LO2/LH2 OTV sized to be capable of the 50-man geosynchronous station mission. The report says that in Volume 1 (on a page I have so far failed to locate), it specifies that the OTV will have to have a wet mass of 306,000 kg and an impulse propellant loading of 281,000 kg.
Graph from the upper-left corner of Figure 1-13 (sheet 1)
Referring to the graph from the upper-left corner of Figure 1-13 (sheet 1), the one for Structure and Mechanism mass, looking at a impulse propellant loading mass of 281,000 kg, the Structure and Mechanism mass will be 8,935 kg. At least that's what the report says, that graph not only lacks the accuracy, I had to manually extend it because 281,000 kg wasn't on the graph.
Do this with the rest of the graphs to obtain the following:
Intermediate Single-Stage LO2/LH2 Orbital Transport Vehicle
click for larger image
Small Single-Stage LO2/LH2 Orbital Transport Vehicle
click for larger image
1½ Stage LO2/LH2 Orbital Transport Vehicle
click for larger image
Large Common-Stage LO2/LH2 Orbital Transport Vehicle
click for larger image
Intermediate Common-Stage LO2/LH2 Orbital Transport Vehicle
click for larger image
General Dynamics concept art Click for larger image
During the July 1976 NASA/Boeing working session, discussions were held with Mr. John Steams of JPL
on the subject of nuclearelectric tugs (NET'S). Sizing and performance estimating data were
obtained as reflected in the analyses described below.
Argon MPD Thruster-Experiments at Princeton have lased argon magneto plasmadynamic (MPD)
devices to create plasmas for plasma physics experiments. Analyses of similar devices used as
thrusters indicates that dearable performance characteristics may be obtainable. Table 1.2-1
indicates representative target values. These performance figures have not been confirmed by test, but we judged to be reasonable w3en
associated with a system like the NET requiring a major development effort.
Reactor Power Generation Systems-The reactor design approach, suggested by Mr. Steams,
employs a high temperature, fast spectrum reactor cooled by heat pipes. Either thermionic or high
temperature Brayton conversion systems are potentially practical.
Reactor core assumptions are given in Table 1.2-2.
Power and efficiency budgets are given in Table 1.2-3 and 1.2-4 for the thermionic and Brayton
systems.
The thermal power and efficiency assumptions were used to derive the reactor parametrics show in
Figures 1.2-7 and 1.2-8.
click for larger image
click for larger image
Figure 1.2-9 illustrates the fuel form concept for the thermionic system
including heat pipe. Dimensions shown are representative.
The thermionic system requires only a single active loop, for heat rejection.
The cycle concept is
shown in Figure 1.2-10. Also shown is the Brayton cycle schematic with a primary liquid rnetal loop
coupled to the typical closed Brayton cycle.
Radiator area requirements are shown in Figure 1.2-11.
It is anticipated that the Brayton cycle system will require emergency heat removal radiator in the
primary loop. The emergency heat removal is required only to handle after-heat and the radiator
could be quite small.
click for larger image
Gamma shield dimensions are given in Figure 1.2-12. For the Brayton system the gamma shield
encloses the entire primary loop to minimize radiation from neutron activation of the primary loop
fluid.
Figure 1.2-13 shows outer gamma shield specific mass assuming 100 g/cm2 (205 lb/ft2)
shielding. The gamma shielding is intended to allow unimpeded manned operation around the NET
with the reactor shut down. The shielding allowance is a rough estimate; the manned operation
assumption was arbitrary but appears reasonable for the intended mission use. Very little neutron
shielding is provided; the unshielded standoff distance for manned operations with the reactor at
full power will be on the order of 10 km (5.4 n mi).
click for larger image
Specific mass estimates for other items are given in Table 1.2-5 and 1.2-6. The Brayton power
processing mass is greater than that for thermionics because AC/DC conversion is required. The
thermionics radiator is estimated heavier per unit area because it includes a complete licluid loop;
the Brayton gas radiator includes gas inventory and containers.
A mass growth allowance of 25% was applied for connecting structure, auxiliary propulsion,
avionics, controls, and unidentified items. The completed specific mass estimates, excluding main
propellant tankage, are shown in Figure 1.2-14.
click for larger image
Performance and Design Point Selection-These specific mass estimates were used to develop the
performance estimates shown in Figures 1.2-15 and 1.2-16. Mass of main propellant tankage was
estimated as 5% of the main propellant (argon) required. Since all the power generation systems
were similar in specific mass, average values were used for the performance calculations
The geosynchronous space station delivery mission requires delivery of 6l,000 kg (135,000 lb). The
2 megawatt (jet power) tug can perform this delivery in about 75 days, or can deliver the entire
station as a single payload in about 110 days
click for larger image
click for larger image
Reactor disposal can be accomplished by sending the NET to solar system escape (no payload).
Propellant required for the 2 MWj NET is 120,000 kg (265,000 lb): this requirement sizes the
propellant tank. 2 MWj with a single-ended reactor and high temperature Brayton cycle was
arbitrarily selected for a point design. The double-ended thermionic system is essentially equivalent
in performance: a tradeoff beyond the scope of the FSTSA study would he required to make a
selection. Design data are summarized in Table 1.2-7.
The point design is shown in Figures 1.2-17 and 1.2-18. A mass estimate for this point design is
provided in Table 1.2-8.
In 1970 the European Launcher Development Organisation (ELDO) awarded a contract to two European industrial consortia to study the feasibility and economic aspects of space tugs. Dornier Systems (a west German aerospace firm) produced this proposal.
The vital components were the Core Unit (propulsion system and basic propellant load) and the Auxiliary Units (a series of modules with additional propellant clustered around the core). The number of auxiliary units can be tailored to the delta V requirements for the mission (2 to 6 auxiliary units). If the mission required a large payload and/or large delta V, the auxiliary units could be staged (jettisoined when they became empty)
The core unit contained 14,700 kg of propellant, and each auxiliary unit had 6,600 kg of additional propellant.
The core unit alone with no auxiliary units can inject a payload of up to 2,000 kg into a geostationary orbit and return (8,800 m/s ΔV). The core unit can inject 6,100 kg of payload into geostationary orbit but will not be able to return (4,400 m/s ΔV). In between missions the core unit waits in a LEO parking orbit.
Payload to Geostationary Orbit
Aux Modules
Tug Reused
Tug Expended
0 (just Core)
2,000 kg
6,100 kg
2
6,700 kg
11,600 kg
3
9,700 kg
14,100 kg
4
12,900 kg
17,600 kg
6
18,900 kg
25,000 kg
Example
Take the first trip: Tug with just the core (no auxiliary units) for 1,800 kg dry mass, 14,700 kg of propellant, and 2,000 kg payload. First leg of the trip is traveling from LEO to GEO, requiring 4,400 m/s ΔV.
ΔV = ship's total deltaV capability (m/s) Ve = exhaust velocity of propulsion system (m/s) M = mass of rocket with full propellant tanks (kg) Me = mass of rocket with empty propellant tanks (kg) R = ship's mass ratio ex = antilog base e or inverse of natural logarithm of x, the "ex" key on your calculator
Plugging in our values:
R = e(ΔV / Ve)
R = e(4,400 / 4,410)
R = e(0.9977)
R = 2.7
We can use this mass ratio to calculate how much propellant was burnt. Mass ratio is
Me = M / R
Me = (1,800 {dry mass} + 14,700 {propellant} + 2,000{payload}) / 2.7
Me = (18,500) / 2.7
Me = 6,850 kg
So the tug arrives at GEO with a total mass of 6,850 kg. We know that 1,800 kg is dry mass and 2,000 kg is payload. By subracting we see that there is 3,050 kg of propellant left.
In GEO, the 2,000 kg payload is delivered, and is no long part of the tug's total mass.
It is time for the second leg of the trip. Now the tug has a wet mass of 1,800 + 3,050 = 4,850 kg. It has a mass ratio of 4,850 / 1,800 = 2.69. How much ΔV does it have?
ΔV = Ve * ln[R]
ΔV = 4,410 * ln[2.69]
ΔV = 4,410 * 0.99
ΔV = 4,370 m/s
4,370 m/s is close enough for government work to the 4,400 ΔV required to travel from GEO back to the LEO parking orbit.
Wto means "wet mass". λ- means propellant fraction. Total Massmax means wet mass with core module and six auxiliary modules. In Germany, the comma is used as a decimal point.
Visualization by space artist Nick Stevens
click for larger image
If I am reading the scanty documentation correctly, what the reports calls "Dry Weight" is what is generally called "Inert Mass" (sum of mass of propulsion, structure, and power plant). What the reports calls "Inert Weight" is a weird sum of the mass of propulsion, structure, power plant, and propellant for the reaction control system. What the report calls "Stage Weight" is what is generally called the "Wet Mass" MINUS the payload mass.
Assuming that is true, I made a quick table. Pretty impressive, actually. It takes about 8 km/sec of delta-V to travel from LEO to Low Lunar Orbit, and about 6.0 km/sec to go from LEO to GEO. So it could deliver about 195 metric tons to Low Lunar Orbit and 155 metric tons to GEO. But do check my math.
Space Tug: Gas-Core NTR
Inert=91,920 kg, Propellant=124,280 kg, Exhaust Velocity=22,100 m/s
The nuclear Cargo Orbital Transport Vehicle (COTV) concept analyzed combined the desirable features
of the chemical COTV and the electrical COTV — high thrust and high specific
impulse, respectively. The stage, shown on Figure A-21, has a nuclear gas
core, light bulb-shaped engine with a theoretical specific impulse of
2250 seconds and a thrust level of 890,000 newtons. The component mass
breakdown is given in Table A-3.
Although such a system could meet the
short trip time requirement for personnel transfer and the high performance
requirement for cargo transfer, the development risks and the presence of
nuclear materials in LEO eliminated this system from further consideration.
by Rockwell (length of 2.62 m is obviously wrong, because it would make the length shorter than the diameter. Previous diagram had length of 7.62 m, which fits the scale.)click for larger image
Gas-Core NTR COTV
Energy Source
Uranium 233 dioxide
Propellants
LH2
Specific Impulse
2080 to 2425 s
Thrust
445 to 1780 kN
Engine Mass
42,000 to 91,000 kg
Pressures
271 kN/m2 (operating) 384 kN/m2 (maximum)
Mass Schedule
Stage Element
Mass kg
Structures and Mechanisms
18,780
Main Propulsion System
56,800 56,850
Auxiliary Propulsion
600
Avionics
260
Electric Power
480
Thermal Control
1,220
Growth Allowance (15%)
11,730
DRY MASS
89,920
Auxiliary Propellants and Fluids
2 000
INERT MASS
91,920
Mainstage Propellants LM2 LH2
124,290
OTV TOTAL MASS
216,210
3. Gas-Core Reactor OTV
A nuclear-reactor heat source was considered as an alternative to the
solar array to power the OTVs (orbital transfer vehicles). The gas-core reactor was studied as the concept most adaptable to this mission and is presented in Figure 33.
The specific impulse of a nuclear propulsion system is intermediate between that of chemical systems and electrical propulsion systems as indicated below:
Mass in orbit, hence cost, can be expected to be less with higher Isp.
Neutron and X-ray radiation shielding is required for reactor usage in proximity to personnel. This consideration would seriously limit the flexibility with which such a vehicle could be used. Shielding is heavy and shielding design is a difficult problem. After-heat disposal during reactor shut-down is also an important consideration. Unshielded reactors, on the other hand, would require remote handling so that malfunction repair and maintenance in space could be expected to be very difficult; however, it warrants further consideration.
The basic concept of the gas-core reactor relies on the use of thermal radiant energy transfer from a high temperature (∼80,000° K) radiating fissioning uranium plasma to a submicron tungsten particle-seeded hydrogen propellant stream. The plasma is vortex-confined by a cool nonabsorbing buffer gas. In one of the several gas-core reactor concepts which have been conceived, the fuel and buffer gas flows are separated from the propellant stream in the core by a transparent wall which allows containment of the fuel within a closed-loop circuit.
The fuel would be processed for subsequent reinjection into the core region. Propellant exit temperatures in the range of 4,000° K to 6,700° K are predicted for the previous range of fuel-radiating temperatures. Corresponding specific impulse in the range of 1,000 sec to 1,900 sec and thrust-to-weight ratios of 0.3 to 1.3 have been estimated for engine powers of 600 mW to 4,600 mW. (Engine mass without propellant is 39,000 kg or 85,800 lbm.)
The gas-core reactor engine offers the combination of high thrust and moderate specific impulse with the result that rapid LEO-to-GEO trips can be made. Thus, perhaps as few as one vehicle would be required, consequently reducing mass in LEO. However, it must be realized that crew shielding (shallow (sic) shielding) must be incorporated that, depending on the safety considerations, will add to the engine basic weight. An assessment must also be made of potential upper atmospheric pollution.
The technology development for the gas-core reactor would probably be longer than electric propulsion devices, but the high thrust, high specific impulse combination may make the gas-core reactor a promising candidate for use in applications beyond the initial deployments.
Although the gas-core reactor requires advanced development of several disciplines, numerous "proof-of-principles" experiments have been conducted over the past 15 years. For instance, a seeded flowing gas stream (simulating the propellant) has been heated by radiation from a dense plasma to temperatures exceeding 4,000° K. A radiating plasma (equivalent black-body temperature of 6,000° K) consisting of argon and UF6(uranium hexafluoride) has been successfully contained within a container of cooled fused silica without causing coating of the walls and transmitting over 90 per cent of the source radiation through the walls. A system was developed that permitted separation of the uranium from the argon and demonstrated that recirculation of the UF6 was indeed feasible.
While these experiments have been on a small scale relative to that required for the nuclear light bulb engine, they do demonstrate that much of the technological "know-how" necessary has been developed.
The MOTV was intended for a series of orbital missions, listed in the table. They range from short-duration/small-crew/low-mission-hardware-mass to long-duration/large-crew/heavy-mission-hardware-mass. Orbits range from GEO to 12hr/63° elliptic to deep space (400,000 nautical miles circular).
The crew capsule had several configurations: two or three crew, and basic/functional minimum. Basic has the luxury of tiny privacy quarters for each crew. Functional minimum on the other hand is dreadfully spartan, with no privacy whatsoever.
Basic has 4 m3 per crew, while functional minimum has only 3 m3.
Why does "functional minimum exist? To reduce mass, of course. Every gram counts. By removing the privacy quarters by combining work and sleep stations you can shorten the 3-crew capsule by an entire meter, and save 440 kilograms of dry mass. The 2-crew capsule shortens by 1.5 meters and saves 805 kilograms. The reductions are figured from the length and mass of the 3-crew basic capsule.
As it turns out, most of the missions can be performed by two crew.
The propulsion system is contained in a central core module aft of the crew capsule. It has a capacity of 17,500 kg of LH2/LOX fuel. It is equipped with two RLIO cat IIB type engines with a specific impulse of 458 seconds. Each engine delivers 67,000 Newtons and can be gimbaled over ±20°. The wide gimbal range is due to the huge shift in the spacecraft's center of gravity when it jettisons a drop tank.
In addition the core has four reaction control system (RCS) modules with 700 N of thrust each. They have a specific impulse of 230 seconds and are fueled with 2,600 kg of hydrazine. The core's intertank skirt has assorted other equipment mounted: three fuel cells and reactant, 4.53 m3 of heat radiator, and an optional 12 kWe solar array.
The core can have up to four drop tanks mounted, each containing 27,270 kg of fuel. Each has a tiny deorbit engine to send expended tanks to burn up in Terra's atmosphere. All tanks (including the core tank) will have a boiloff rate not to exceed 19 kg/day per tank. The heat from Sol makes cryogenic fuels boil, the vapor has to be vented or the tanks explode. Use it or lose it.
MOTV configuration for Mission S1
MOTV Crew Module (3 crew) for Mission S1
click for larger image
MOTV for Mission S1 weight statement
MOTV configuration for Mission ER2
MOTV for Mission ER2 weight statement
MOTV configuration for Mission P2
MOTV for Mission P2 weight statement
MOTV configuration for Mission P4
MOTV for Mission P4 weight statement
MOTV configuration for Mission DR1
MOTV for Mission DR1 weight statement
MOTV configuration for Mission C3
MOTV for Mission C3 weight statement
MOTV Crew Module (3 crew) for Mission C
MOTV Crew Module (10 crew)
Work station configuration with "high-gear" manipulator and tandem crew arrangement
Work station view
Environmental Control And Life Support System
Berthing ring interface mechanism - McDonnell-Douglas configuration
Docking interface - Rockwell configuration
Space Tug: Johnson Space Center
This is from a Johnson Space Center report Initial technical environmental, and economic evaluation of space solar power concepts. Volume 2: Detailed report. The tug design will be used to assist construction of a gigantic solar power station (SPS). The spacecraft is called a Personnel Orbital Transfer Vehicle (POTV) or a Cargo Orbital Transfer Vehicle (COTV), depending upon whether a personnel or cargo module is docked to the crew module. OTV is a fancy word for "space tug".
MISSIONS
The basic mission will be a trip from Low Earth Orbit (LEO, 200 to 500 km altitude from Terra's surface) to Geosynchronous Orbit (GEO, 42,164 km from Terra's center) then back to LEO. Transit time from LEO to GEO will be from 8 to 9 hours.
There were three main missions proposed for the OTV:
Geosynchronous Sortie A 4 crew mission spending a week on geosynchronous satellite maintenance, with transfers of up to 15° longitude between each satellite visit. Only the crew module is required, added to the propulsion stages.
Crew Rotation The contruction and operational crews on the solar power stations will be rotated at least every six months due to allowable radiation dose. A crew module and a personnel module are required, added to the propulsion stages.
Station Resupply Replenish the GEO station consumable, supplies, and equipment necessary for 180 days.
For some missions the spacecraft is configured with two stages. The initial burn is to leave LEO and enter the GEO transfer orbit. When 85% of the required delta V has been generated, staging occurres. But the first stage is not discarded. Upon staging, the first stage still has some propellant left. The stage uses the remaining propellant to return to LEO under automatic pilot. The weird 85% staging point is to allow both first and second stages to have identical propellant tanks and delta V. They do have a different number of engines, so the first stage has a higher acceleration.
Delta V budget for Geosynchronous Sortie mission
Delta V budget for Crew Rotation or Station Resupply mission
where both stages refuel in LEO (i.e.,beforeorbital propellant depots are available at GEO)
Delta V budget for Crew Rotation or Station Resupply mission
where stage 1 refuels at LEO but stage 2 refuels at GEO (i.e.,afterorbital propellant depots are available at GEO)
MODULES
The modular design has three components: propulsion stages, crew modules, and resupply modules. All modules are sized so they will fit in a space shuttle payload bay (maximum diameter 4.42 meters, maximum length).
Mass schedule for the propulsion module configured for the Geosynchronous Sortie Mission
Vehicle ignition mass (including required propellant) vs payload mass
Upper curve is mission where both stages are refueled at LEO, and payload is returned to LEO (Geosynchronous Sortie)
Lower curve is mission where 2nd stage is refueled at GEO, and payload is left at GEO
click for larger image
This concept consists of two nearly
identical stages used in tandem that provide the required mission delta-V.
The first of these stages is unmanned and is used to provide approximately
85% of the delta-V required for departure from LEO on a crew
rotation flight. Stage 2 provides the remainder of the boost delta-V
as well as the impulse required for injection into the destination
orbit and for the return to LEO.
Following separation from stage 2,
stage 1 is returned unmanned to LEO. Splitting the delta-V as described
above results in the stages having identical propellant capacities. Subsystems
design approaches are also common between the stages including
the size of the main engine. Taken individually, each of these stages
is similar to the single stage concept in terms of subsystem selection and
location.
At the forward end of the stage 1 are two types of docking provisions.
One of these systems isused to connect with stage 2 while the
center mounted unit is an international type design that allows docking
with systems other than stage 2; examples of these other systems include
a tanker for independent servicing or a space station ifbasing isrequired
while awaiting the return of stage 2.
Stage 2 docking provisions are required at both the forward
and aft ends. The forward docking station uses an international type
unit for attaching payloads. In addition, this unit accommodates tankers
or is used to connect the stage to a space station for basing. The aft
docking provisions are used in conjunction with those in the forward
section of stage 1 and enable the stages to be connected. Provisions
are also included on stage 2 to allow servicing of stage 1 when the two
stages are connected, and the tanker is docked at the forward end of
stage 2.
The OTV start burn mass is 123 metric tons (I think this includes one crew module) with a main
propellant loading of 106 metric tons. Each stage is 4.42 meters in
diameter and 17.06 meters in length (stage 2 length is 15.61 meters with
engine nozzles retracted) and are Shuttle compatible and require on-orbit fueling and refueling. The first stage employes four 66,720 newtons thrust engines and the second stage employs two of the same engines.
Crew Module
Crew Module
Generally carries two crew, but can accommodate up to four
click for larger image
Crew Module mass statement
Personnel Module
Personnel Module
Contains enough shielding to protect the passengers from the Van Allen radiation belt.
Baseline module carries 75 passengers and has a total loaded weight of 19 metric tons
click for larger image
Resupply Module
Resupply Module
Sized for 180 days/25 crew worth of supplies and consumables (4,500 person-days of supplies). Supply mass of 29 metric tons.
Baseline payload density is assumed to be 128 kg/m3
click for larger image
STACKS
Geosynchronous Sortie Mission
Two staged with only crew module
click for larger image
Crew Rotation or Station Resupply Mission
Two staged with crew module and personnel module. LEO to GEO leg of the mission
Crew Rotation or Station Resupply Mission
Stage one has detached and returned to LEO under autopilot
GEO to LEO leg of the mission
click for larger image
The following designs have a very similar appearance to the JSC space tug. Also similar to the Boeing Common Stage LO2/LH2 OTV
General Dynamics concept art Click for larger image
Detail
INTRA-FLEET TUGS
So four days ago or there abouts, I put a poll up on Google+ with a selection of spacecraft I was thinking about making isometric cutaways of. The frontrunner is the Intra-Fleet Space Tug. That means, RocketFans, that we’ve got ourselves a project!
This is not the tug.
The context for this particular spacecraft, like the Cygnus capsule I also put in the poll, is the care and feeding of the distributed-network fortification that is a deployed UN Constellation in the Conjunctionsetting. In summary, the fleet’s configuration is a tetrahedron in space with a single control ship at the apex, patrol craft making up the other three vertices, and edges three hundred thousand kilometers long. Just how do you supply ships that are as far out as the Moon is from LEO?
Cygnus docking with a Class A Patrol Craft
In the article about how fleets work, I stated that the crews on the patrol craft could be swapped out by ferrying fresh people out via the Cygnus. While this would certainly work for crew transfers, you’d also have to detail additional craft for cargo transfers, of consumables and (if armed with rail guns) ammunition. As versatile as the Cygnus is, it cannot not re-supply that most important consumable resource in terms of tactical movement, propellant. To put the problem into perspective, a Cygnus stack is a rough cylinder 4.5 meters in diameter and about ten meters long. The propellant tanks on a Type A Patrol Cutter are 8 meters in diameter and total thirty meters long. And there are two stacks. Clearly, to refuel a patrol ship, we need a real tanker. I’ve said it before RocketFans, and I’ll surely say it again: Atomic Rockets is an invaluable resource for the budding rocketeer. The “Realistic Designs” sections are a veritable clearinghouse of old NASA designs that were pretty good but never got a decent budget. These oldies make for a great library of inspiration when designing any spacecraft that is meant to work with real-world physics. For our Intra-Fleet Tug, I was inspired by the Johnson Space Center’sTug study, who’s image I used in the Poll. This beauty is a two-stage ferry to get from LEO to GEO where NASA was going to build a solar power station. Anyway, a light-second is good deal further than the LEO/ GEO distance, right? In kilometers, yes, but in Delta-V, not even close. It takes a whopping 4.33 km/s to go from LEO to GEO, but a paltry 2.74 km/s to get from LEO to Lunar orbit…a little over a light-second away. Gravity is funny like that. So our tug only needs about 75% the range of the JSC version. Since that design was staged and the first staged carried the spacecraft 85% of the way to GEO we could just lop of Stage I and call it a day. But where’s the fun in that? The problem with just ripping of the JSC design is that it isn’t a tanker. We need to be able to deliver a large amount of propellant, so we’re going to need a large spacecraft. Something that could haul at least a quarter or half of the Delta-V needed to completely refuel a Patrol craft. What follows is an experiment: I’m thinking of just taking an entire rocket stack from a Patrol craft and slapping a command module on the front for our Tug. Let’s see how that would work, shall we? First of all, we need to dust off our rocketry equations so we know what variables we need to consider. We’re going to need to know the Tugs dry mass, wet mass, and engine details such as propellant flow, thrust, and exhaust velocity. Since we’re using the dimensions of the propellant tanks from the Class A Patrol Craft, and possibly one of its main engines, that gives us a great place to start. In fact, lets crunch the numbers for the Patrol rocket’s main engine and an alternate, say something along the lines of the J-2 from the Saturn V’s SIV-B stage. First, let’s establish the tonnage for the Tug without it’s engines. We’ll want a decent sized crew module, because gaming, and also so we can have cadets aboard during all flights. In Conjunction, like in Heinlein’s Space Cadet every UN convoy and spacecraft has a group of peacekeeper candidates learning how to work in space by working in space. I see an actual crew of about four: a Flight Commander (F-Com), Guidance Procedures Officer (GPO), Maintenance, Mechanical Arms, and Crew Systems Officer (MACS), and a Payload Officer (Payload). Add as many again of Candy-Cruisers, and you’ve got eight people in the command module. That’s a bit crowded for a Tug, but we can use hot-bunking with to limit the sleeping berths to four. The CM must also have at least a pair of robotic arms, and a sturdy docking module for carrying passenger capsules and cargo pods. Behind the CM will sit a flared-out service module, with avionics, life support, and computer systems. The SM will be mated to a 30 × 10 meter saddle truss, which is what will actually hold our propellant tanks and provide a mount for the rocket stack. But in addition to all of that, we will also need a passenger module and cargo pods, so we need to know the mass for all of those as well. Here’s how it breaks down:
System
Mass (kg)
Command Module
12,671
Service Module
3,000
Saddle Truss
24,119
Propellant tanks
24,119
Passenger Module
7,540
Crew Average Mass
2,400
Cargo/consumables
392,883
TOTAL DRY MASS
466,732
LH2
71,204
LOX
305,788
TOTAL PROPELLANT MASS
376,992
TOTAL WET MASS
843,724
I arrived at some of these number dubiously, so take them with a grain of salt. The CM mass is from the Trans Hab Calculator on the AR website, the SM is from the JSC Tug, the truss is simply repeating the mass of the propellant tanks, since I couldn’t find any reliable numbers for that. The Passenger module is also from the JSC tug, while the consumables and cargo masses are calculated for the tugs trip out and back, as well as 30 days of supplies for the 20-person crew of a Patrol craft. And of course, we can’t forget the mass of the crew and passengers themselves, plus what ever possessions they can carry inside their regulation 100 kg mass-limit. Finally, the propellant tank mass is 6% of the propellant mass, as per Dr. Rob Zubrin, and the propellant masses came from the Useful Tables appendix from Atomic Rockets. But the most important thing to remember is that we have no engine yet. The Class A Patrol craft uses an easy to maintain in freefall analog of the Space Shuttle Main Engine (SSME) so I could simply steal copy the vital statistics. Engine List on Atomic Rockets has these available. Just below that entry is the stats for the Tug engine we will also use. These are not exactly the J-2 stats, but they are for a NASA tug, and they have the information I need to calculate with, whereas sources on the J-2 did not. What we want to know is, assuming a 100-hour flight time, is how much propellant will be left in the big tanks at the end? We need to have spend no more than 1/3 of our propellant mass in transit. That way, we can refuel with another third (plus a bit extra) and use the remaining less-than-a-third to take our much less massive tug home. This means math. So, so much math. Well, not so much, perhaps. We know all the vital statistics for our engines, our mass numbers, our Delta-V budget, and our distances. By establishing an arbitrary travel time of 100 hours, we also provided a much-needed value for equations, and more important, the mass of needed consumables. An Intra-Fleet Tug that uses a “F-2b” SSME-analog will have a wet mass of 846,901 kg, or 847 tons. Let’s see if we can get from point A to B while only burning through 125,664 kg of propellant. Simple, right? If only using 125.6 tons of our propellant, we will be operating with a mass ratio of only 1.8 By using the Delta-V equation of Delta-V = Exhaust Velocity × ln(Mass Ratio). This results in a Delta-V of 2621.96 m/s, or 2.62 km/s. We need 2.74 km/s to get to our destination, so it’s close, but no cigar. If we attempt the same thing with our J-2 analog, we have a wet mass of 845,512 kg. This gives us a mass ratio of 1.8 again. However, the exhaust velocity is 4159.4 (I had to calculate it using the specific impulse, but that’s why we have algerbra in the first place). With the mass ratio and a lower exhaust velocity, the Delta-V is 2.45 km/s. Both engines are pretty comparable, but neither will get us out a light second and back. Or will they? The moon averages 384,000 kilometers from Earth. A light-second is only 300,000 kilometers. We actually have less distance to travel, and hopefully less Delta-V, than the 2.74 km/s we’ve been using. Possibly a lot less. I forgot that moving around a fleet formation like this is not remotely the same as moving around orbits. Moving from LEO to Luna is a Hohmann trajectory, which is a change between orbits from around one body moving at one speed to another body moving at a very different speed. When deployed, our constellation is all moving at a constant speed along a constant orbit/vector. This means that all spacecraft in the formation are at rest relative to one another. So we need to go from a starting velocity of (relatively) zero to a certain speed, coast, flip, and then decelerate back to zero. This is just a simple physics problem. This is also where our arbitrary 100-hour travel time comes in. With time and distance known, as well as acceleration (Thanks to the engine stats) we can solve for velocity and begin to figure out what we need to know. Solving the displacement equation gives us an average velocity of 833.333 m/s to travel a light-second in four days and change. This means we need a final velocity of 1666.666 m/s. Our SSME engine will take only 721 seconds to boost our monster tug to speed, and the same to decelerate at the other end. Now for the biggie – mileage. By which I mean, just how much propellant did we use up in those 1442 seconds? Turns out that’s an easy one, because we know the mass flow. A single SSME tosses 409 kilos out the back every second, so our Tug will have to burn 589,778 kg. This is more than the entire wet mass of the tug, so say nothing of the “one-third” we wanted to get by with. As for the J-2, we need to re-do our acceleration calculation so we can figure our burn duration. Unfortunately, with a burn duration of 1282 seconds one way, the performance is even worse. What went wrong? This tug has half the power or a patrol rocket – it should have at least comparable performance.
Its right there in black and white. Literally.
Having gone back over my notes I discovered my problem, and it’s an embarrassing one. The Class A Patrol Craft I just mentioned, the one that’s over twice as large as this tug? It has a dead weight tonnage of 70 tons. That’s it. The Tug has a dry mass of 466 tons. Well, there’s our problem! I designed the Patrol Craft to take into account the likely progression of materials science toward ever lighter and stronger materials. It was built out something that has the same strength of titanium, and half the mass. Add to that it’s outer skin is mostly carbon and aerogel – literally the least dense substance there is – and its easy to see that simply cribbing numbers from a design made when aluminum was the lightest thing you could build spacecraft of is a problem. Let’s try this again shall we?
System
Mass (kg)
Total Structure Mass
24,119
Crew Average Mass
2,400
Cargo/consumables
4,245
TOTAL DRY MASS
30,764
LH2
71,204
LOX
305,788
TOTAL PROPELLANT MASS
376,992
With J-2
409,544
TOTAL WET MASS
407,756
With SSME
409,337
I not only went back and recalculated the structure mass using 22nd century materials, I also hand-calculated the mass of the consumables and cargo, using NASA rations. Much better results. With these stats, the Tug can pull 4.43 m/s, and only has to burn for a total of 376, instead of 1442. This means we only burn 141,514 kg of propellant. With less thrust and more mass, I don’t feel a need to calculate for the J-2. 141.5 tons of propellant is 37% of our propellant mass. For the return trip, we’ll need less propellant, say, 25%? The Tug would only mass 126 at that propellant fraction, and accelerate at a whopping 14.4 m/s, or 1.4 gs. It will only have to accelerate for 115 seconds and burn only 43 tons of propellant, while carrying 96 tons. This is over a 100% reserve, enough that we could add another 20 tons or so to the 124 tons our Tug is pumping into the Patrol craft. So, there you have it, RocketFans, a glimpse into the hair-tearing-out, thankless job of designing a realistic spacecraft. I’m glad I just have to make these look good on paper. But the important part is, I can now draw a spacecraft with all the particulars I wanted to, and it will not only look realistic, it will be realistic. It’s capabilities and limitation will suggest numerous plot points and story ideas, and I can be assured that each and every one of them will pass the litmus test of plausibility, because I did the math up front.
Details are sparse on this 1963 design. Click on blueprints for larger image. Blueprint is written in Italian but it has been translated for the website by Alberto Bursi. The engines are around the waist, on swivels. The designers also appear to have a flippant attitude towards maintaining a sense of up and down. If the pilot turns his head he will see his copilot's feet.
Lockheed Martin is not fooling around. All the other space tugs listed here use chemical rockets, this one uses nuclear thermal rocket. A bimodal one at that. The other tugs were designed for operations in the cis-lunar area, but this atomic baby can deliver 3,500 kilogram payloads to the outer planets. Without needing gravity-assist.
It can also deliver about 20% more kilograms of payload to geostationary orbit than current boost vehicles. It can extend the life of existing space assets by providing end of life disposal. And it can also reboost satellites which were not delivered their final orbit by their launch systems.
The tug is uncrewed, it is either remote controlled or by onboard autopilot.
NUCLEAR ENGINE FOR BIMODAL APPLICATIONS
Bimodal engines are where the unit can operate at high temperature / short duration mode for propulsion, and at low temperature / long duration mode for electrical power generation. Which is a royal pain to get such diametrically opposed parameters into a single unit.
A common power generation reactor uses pins of uranium nitride (UN) as fuel. A common propulsion reactor uses cermet fuel, which is ceramic fuel particles such as uranium dioxide (UO2) embedded in a tungsten (W) matrix with a high melting point (UO2-W cermet). In 1994 a joint USAF/Phillips Laboratory program managed to merge these two fuels in one reactor, called Nuclear Engine for Bimodal Applications (NEBA)-3. Hydrogen is heated for propulsion and coolant containing liquid lithium is heated for electrical power generation. NEBA-3 in propulsion mode can give a specific impulse of 850 seconds (exhaust velocity of 8,340 m/s) at thrusts of 90 to 925 Newtons. In power mode it can supply 10 kilowatts of electricity for ten years. System mass is about 1,500 kg. There are some details in this patent. Now you know as much as I know, most of the details are locked up in articles I do not have access to. I got the details from the abstract.
Bimodal Engines
NEBA-1
NEBA-3
Power (kWe)
10
10
Thrust (N)
2,200
900
Isp (sec)
825
858
Exhaust Vel (m/s)
8,090
8,410
Mass (kg)
1,410
1,589
Core Diameter (m)
?
0.655
Assembled Length (m)
?
1.162
The engine reaches its end of life once it has delivered 100 meters per second of delta V. It is then put into a disposal orbit.
The report's analysis found early on that the NEBA-1 and NEBA-3 had very similar performance. So the rest of the study assumed the NEBA-3 would be used. The NEBA-1 has longer and more fragile heat pipes.
VEHICLE CONCEPT
The vehicle uses two components: a resuable tug and a non-resuable propellant-payload module. A propellant-payload module is boosted into an 185 km circular orbit. The nuclear tug proper uses its hydrazine RCS to rendezvous and dock with the propellant/payload. The tug delivers the payload to its destination using the propellant. Then the tug returns to a parking orbit (500 km circular, so it doesn't irratiate Terra's surface with deadly radiation) using the remaining propellant and waits for the next mission.
It uses electrical propulsion for station keeping in parking orbit. Either an ion drive with xenon propellant and a specific impulse of 3,000 seconds, or an arcjet with ammonia propellant and a specific impulse of 800 seconds.
Thermal propulsion is assumed to be used for delivering satellites because ion drives take too long. Especially with only 10 kWe of power. Time is money. Thermal propulsion can deliver a satellite in about ten days, ion drive would take about a year and a half.
The report assumes that the vehicle's dry mass contingency is 20%, the propellant residual is 1.5% of total propellants, and the flight performance reserve is 2% of the delta V.
The report did a survey of various lift vehicles. The reusable tug and the propellant-payload module will have to be sized to fit into the lift vehicle payload fairing. They narrowed the suitable lift vehicles down to ones with a narrow payload fairing diameter of 3.6 meters (11 feet) and ones with a wide payload fairing diameter of 4.3 meters (14 feet).
In each vehicles' "First Flight", the lift vehicle boosts both the tug and a propellant-payload module. In the subsequent "Steady State" flights the lift vehicle only boosts a propellant-payload, the tug in parking orbit is reused. This means that the propellant tank in a Steady State boost can be longer than the First Flight boost, since there is no tug to take up space in the payload fairing.
This is sized for the 4.3 meter (14 foot) diameter payload fairing of the Titan-IV and EELV boost vehicles.
MISSIONS
The tug can perform several cis-Lunar missions. However for missions to Mars, Jupiter, Pluto, or the asteroids; it cannot carry enough propellant to return to Terra orbit. To amortize the cost of the tug, the report suggest using it for lots of cis-Lunar missions then a planetary mission for its last flight. Obviously this will result in a radioactive tug orbiting the planet in question, but that will be something for future missions to worry about. Or for hypothetical space pirates who are hard up for uranium and don't mind the effort of reprocessing the fuel rods.
The cis-Lunar mission require less than 10 hours of thermal burn time, each. The planetary missions can approach 20 hours.
PLANETARY MISSION
Mission
C3
Mars Delivery
20 km2/s2
Jupiter Delivery
130 km2/s2
Pluto Delivery
150 km2/s2
Asteroid Flyby
0.5 to 4 km2/s2
Asteroid Rendezvous
30 to 55 km2/s2
Space Tug: NASA
RocketCat sez
This is a spiffy design for giant robot fans. Those titanic mecha arms will immediately grab the attention anybody who adores Jaegers.
This is a 1972 era NASA concept for a space tug. It is a modular design. It is an altered version of an old Boeing space tug design. One way to tell the difference is that the Boeing tug's crew and cargo modules were spherical, while the NASA tug's modules were cylindrical.
For purposes of analysis, they created designs for three different missions:
MISSIONS
Mission Type
Number of Crew
Mission Duration
Supply
Space (LEO)
6
7 days
42 crew-days
Lunar Stay
4
28 days
112 crew-days
Rescue
12
1 day
12 crew-days
In addition, they mentioned a two-crew "mission" which boiled down to "use a crew module as a control room." You see this often as a crew module perched on top of a Reusable Nuclear Shuttle.
For what it is worth for the Lunar Stay mission, the Apollo Lunar Module descent module used about 2,500 m/s of delta V for the descent and landing, and the ascent module used about 2,220 m/s delta V for the return to orbit. About 4,720 m/s delta V total.
Minimum acceleration for lunar landing/lift-off is about 2.43 m/s2, 2.10 m/s2 in a pinch. The Apollo Lunar Module ascent module had an acceleration of 3.4 m/s2 (2.2 lunar gees)
Below 1.52 m/s2 (lunar surface gravity) you will crash while landing, and at take-off you will just vibrate on the lunar surface while the rocket blast blows the regolith around.
The tug was mandated to be cylindrical. First off they tried to find the optimum diameter.
They did an analysis of crew modules which were 3.6, 4.5, and 6.7 meters in diameter, because those are 12, 15, and 22 feet respectively. 4.5 m is compatible with the Space Shuttle cargo bay. 6.7 m is compatible with the Saturn booster. 3.6 m was a smaller sized picked arbitrarily just to see how it worked.
3.6 m was far too cramped, unless they made it two decks tall. 6.7 m was too big to be economic, unless they stuck the contents of other modules into the crew module (which kind of defeats the entire "modularization" idea). By "too big" they mean it gave the crew space they didn't need, which still costs payload mass for the bulkheads and pressurization. 6.7 m is also too big to fit in the Shuttle cargo bay.
Various sized cargo holds to hold, you know, cargo. Often used to transport supplies to space stations and bases. Some CAM are split long-ways (hemipods) in halves or quarters, and are hung on either side of the propulsion moodule like saddle-bags for a low center of gravity (so the lunar lander isn't quite so tippy when it lands).
Payload (PL)
Special and general purpose cargo which is not carried in cargo modules. Satellites to be placed, experiments, etc.
Docking adapter kit. Provides capability for standard neuter docking to Apollo probe or drogue
Guidance and navigation docking sensor assembly. Attached to foremost surface of tug and payload for active rendezvous and docking capability. Mostly TV camera and contact sensor. Former for maneuvering, latter to signal that the docking clamps can now be activated.
Manipulators (waldo arms) for assembly, maintenance, repair, satellite retrieval, and cargo handling (either bolted to a module or in a submodule)
CM manipulator interface assembly. Human-usable controls for the manipulators, placed inside the crew module.
Neuter docking adapters, for either end of any module
Extra provisions for manned flight
Extra subsystems for manned flight (lunar landing)
Landing gear (lunar landing). Bottom mounted landing legs. These are generally fixed because it turns out that stowage and deployment
of folded gear constitutes a formidable problem. As a general rule you want the gear to be long enough so that at touchdown the main propulsion engine nozzles are at least two exit diameters above the lunar surface.
Lunar landing guidance and navigation sensors. Landing sensor system added to the propulsion module with readouts inside the crew module.
Extra heat radiators
Lunar landing heat radiators. Standard radiators are mounted on the hull. Unfortunately while landed, thermal energy from the sun is reflected from the lunar surface and interferes with the hull radiators. So separate deployable radiators are required, facing the sky. Generally top-mounted. About 28 m2 in two or four panels.
Cable elevator to lower crew to lunar surface. Used if crew module is on the top
Lunar landing antenna. Long-range extensible parabolic antenna (1.8 m diameter) either tug-mounted or portable. Used for additional communication capability.
Electrical Power Kit (for IM) for manned missions or payload support. Includes additional heat radiators.
Aerobraking Kit to allow aerobrake assisted Terra reentry and landing.
In an earlier design, the intelligence module had the rocket engines mounted in the center, and the IM was placed underneath a Tank Set (containing internally both liquid oxygen (LOX) and liquid hydrogen (LH2) tanks). Sometimes there was a dedicated LOX Tank Set and a dedicated LH2 Tank Set.
Propulsion
Propulsion (PM)
The rocket engine
Main propulsion
Auxiliary propellant supply
Two S-band antenna
Landing sensors
Can attach landing gear kit, but usually better to attach to crew module
Holds heat radiators from intelligence module
4.5m diameter, height depends upon amount of propellant contained. With no propellant the mass is approximately 3,580 kilograms. The report studied concepts with 36,287 kg of propellant (LOX+LH2) and 28,576 kg of propellant.
In all designs the engines are chemical LOX/LH2 engines. The example design had an exhaust velocity of around 4,550 m/s and a specific impulse of 464 sec.
The 4.5m lander design had four swing-out engines each with a thrust of 44,482 Newtons (177,928 N total thrust).
It burned at a oxygen/fuel (O/F) ratio of 6 to 1 instead of the theoretical maximum (stoichiometric) of 8:1 (they used 6:1 because of liquid hydrogen's annoyingly low density).
The propellant mass was 36,287 kg or 31,103 kg LOX and 5,184 kg LH2. The LOX tank had a volume of 31.1 cubic meters and the LH2 tank was 93.4m3.
The PM had a diameter of 4.5m and a height of 13.1m.
LEO = Low Earth Orbit
L. Lander = Lunar Lander
IM = Intelligence Module (contains RCS)
PM = Propulsion Module
Drawbacks are in parenthesis
Crew
Crew (CM)
The habitat module the crew lives and works in. This module is optional. The tug can be unmanned, pre-programmed or under remote control.
Two man for a control/working module. Four man for a lunar base module. Six man for crew transport. Twelve slot for emergency evaculation module.
For lunar landers it makes sense to have the crew module on the bottom of the stack, with the landing gear kit attached.
Crew provisions
Environmental control / Life Support System
Environmental control heat radiators
Manual guidance, navigation, and control
Displays (guidance and navigation I/O)
Power distribution
Docking interface
4.5m diameter and 2.4m tall. About 3,960 kg for the space mission (6 crew for 7 days) and 5,613 kg for the lunar landing mission (4 crew for 28 days).
4.5 meter diameter is the best
They did an analysis of crew modules which were 3.6, 4.5, and 6.7 meters in diameter (because those are 12, 15, and 22 feet respectively. 15 feet is compatible with the Space Shuttle cargo bay. 22 feet is compatible with the Saturn booster.). 3.6 m was far too cramped, unless they made it two decks tall. 6.7 m was too big to be economic, unless they stuck the contents of other modules into the crew module (which kind of defeats the entire "modularization" idea).
4.5 m was just right.
For the 4.5m diameter 2.4m tall crew module, they determined the following mass breakdown:
4.5m dia. Crew Module Mass Schedule
Code
System
Space Mission
Lunar Stay Mission
DRY WEIGHT
2.0
Body Structure
1,150 kg
1,150 kg
3.0
Induced Envir Prot
154 kg
154 kg
4.0
Lnch Recov & Dkg
218 kg
218 kg
8.0
Power Conv & Distr
23 kg
23 kg
9.0
Guidance & Navigation
86 kg
95 kg
11.0
Communication
136 kg
136 kg
12.0
Environmental Control
86 kg
89 kg
13.0
Growth Allowance
265 kg
274 kg
14.0
Personnel Provisions
743 kg
832 kg
15.0
Crew Sta Contrl & Pan
70 kg
70 kg
SUBTOTALS (DRY WEIGHT)
2,933 kg
3,038 kg
INERT WEIGHT
17.0
Personnel (90.7 kg each)
544 kg (6 crew)
363 kg (4 crew)
18.0
Cargo, food, etc.
220 kg
735 kg
19.0
Ordnance N2 and TK
9 kg
9 kg
20.0
Ballast EVA
-
163 kg
SUBTOTALS (INERT WEIGHT)
3,706 kg
4,308 kg
GROSS WEIGHT
EPS O2
234 kg
1,182 kg
EPS H2
20 kg
123 kg
TOTALS (GROSS WEIGHT)
3,960 kg
5,613 kg
2.0 Body Structure
Body-structure weight: The weight of the basic and secondary load-carrying members, exclusive of the nonstructural panels used for induced environmental-protection systems.
3.0 Induced Envir Prot
Induced environment protection system. Generally the heat shield on a reentry vehicle.
4.0 Lnch Recov & Dkg
Apparently "Launch, recovery, and docking", so it probably referring to the docking port.
8.0 Power Conv & Distr
Apparently "Power conversion and distribution", so it is probably referring to the electrical power system.
13.0 Growth Allowance
These weight breakowns are typically estimates, submitted when bidding for a NASA contract. The Growth Allowance is insurance, in case one or more of the weight estimates for a subsystem is too low. Since every gram counts, NASA is quite intransigent about weight estimates. The growth allowance gives the contractor some wiggle room before they are in violation of the contract.
15.0 Crew Sta Contrl & Pan
Apparently "Crew stations, controls, and panels", so it is probably referring to the flight control stations.
Ordnance N2 and TK
Apparently "Ordinance, compressed nitrogen and tankage", used for atmosphere or to pressurize the fuel cell tanks.
Ballast EVA
Probably EVA suit(s) or the consumables reserved for EVA activity. Current day EVA suits are about 53 kg each.
EPS O2
Electrical Power Subsystem oxygen, probably Fuel Cell O2 fuel
EPS H2
Electrical Power Subsystem hydrogen, probably Fuel Cell H2 fuel
Dry Weight
The sum of codes 1 through 16. In this usage, it means the mass of the spacecraft/module with no propellant, payload, crew, or consumables.
Inert Weight
The sum of codes 1 through 21. In this usage, it means the mass of the spacecraft/module with everything (payload, crew, consumables) BUT no propellant. Which is the exact opposite terminology that I am used to.
Gross Weight
The sum of codes 1 through 27. The mass of the spacecraft fully loaded with propellant and everything. The "wet mass". Since the crew module has no propulsion it technically does not have propellant. It appears they are including the fuel cell fuel as "propellant."
CM = crew module
C.G. = center of gravity. "High" means spacecraft is prone to topple over when landing
PM = propulsion module, whose walls are made of aluminum foil
L.G. = landing gear. "tare wts" means "something heavy that should not be attached to aluminum foil"
XLNT = excellent
For a Space mission the Space Tug would probably have the crew module mounted on top of the spacecraft stack. There would be a docking port on the top, along with roof windows to assist the pilot with the rendezvous.
For a Lunar-Stay mission, the tug would probably have the crew module mounted on the the bottom of the spacecraft stack. The bottom position would give the pilot a much better view of the landing as opposed to being perched on top of tall spacecraft with no view of what the landing gear (L.G.) was landing on. The landing gear would also be attached to the strong crew module, instead of the aluminum foil thin walls of the propulsion module. The entire spacecraft would have a lower center of gravity, always a plus when trying to land. Once landed, the airlock door will exit only a meter or so above the surface, instead of tens of meters.
The drawback of course is the crew will have a ring-side seat if the space tug crashes. A short view, only until the mass of the rest of the spacecraft (on top of the crew module) accordions it flat like a beer can in a trash compactor. The exhaust nozzles of the propulsion module would be on swing-out engines aimed to fire off the the side instead of hosing the crew module with flaming death. This makes the engine more complex (more points of failure) with a bigger mass penalty.
The crew module is an aluminum honeycomb pressure vessel with a centrally located air lock. There is also an emergency egress hatch in the side wall of 0.91 meters in diameter. The module has a pressurized volume of 31.85 cubic meters.
The control station is a stand-up station similar to the Apollo lunar module. For docking there will be windows for the pilot locate on the roof. For landing there will be angled windows located on the sidewall, again much like the lunar module.
Workstations are chairs with tables. Above the workstation benches are storage cabinets for food preperation, environmental control equipment, and scientific equipment.
Fold-up bunks are provided on the side walls. When folded up, the crew module can be used in rescue mode, with space for twelve persons. Using fold up bunks is far superior to having a totally different design for a rescue crew module.
The airlock is 1.5 meters in diameter with a pressurized volume of 3.78 cubic meters.
Below are the blueprint for the Space Mission (six crew) and Lunar-Stay Mission (four crew) version. There really is not much difference between the two. Basically the Lunar-Stay Mission version has the extra two bunks removed and replaced by additional workstations.
The blueprints show a passive docking ring on the aft end of the crew module. This is the configuration when the crew module is located at the bottom of the spacecraft stack. When the crew module is located at the top, the docking ring will move to the roof, and may be replaced by an active neuter docking system.
4.5 meter diameter
Space Mission Configuration
Top view, measurements in inches
click for larger image
4.5 meter diameter
Lunar Stay Mission Configuration
Top view, measurements in inches
click for larger image
4.5 meter diameter
Space Mission Configuration
Side Views, measurements in inches
click for larger image
4.5 meter diameter
Lunar Stay Mission Configuration
Side views, measurements in inches
click for larger image
The module is a torus with an inner diameter of 2.03m and an outer diameter of 4.57m diameter. It is 0.9m tall. The center hole is for airlocks, propellant pipes, rocket engines, docking ports or whatever.
The module has four reaction control system pods. Each pod has four jets: two aft, one forward, one on each side. There are two jets aft so the RCS can also act as auxiliary propulsion. Each pod can retract into the IM to keep the module within the 4.57m diameter limit of the Shuttle cargo bay.
IM for unmanned tug 1,560 kilograms. IM for manned Space mission 1,703 kg. IM for manned Lunar landing mission 1,973 kg.
Cargo
Various sized cargo holds. Some are split long-ways (hemipods) in halves or quarters, and are hung on either side of the propulsion moodule like saddle-bags for a low center of gravity.
In North American Rockwell's study on constructing a lunar base, they saw a need for a sort of Lunar tractor vehicle with a tall hoist. Lunar base modules could be transported down as a unit by the tug, then unloaded and moved into place by the tractor. Base modules are 9.2 meters long, 4.6 meters in diameter, and have a dry mass of 4,500 kilograms. They have docking ports on each end.
Space tug carries two lunar base modules, each docked to pivoting neuter docking ring. Upon landing, each docking ring can pivot to lower the module close to the lunar surface.
LSB means "Lunar Surface Base"
from Lunar base synthesis study (1971)
Reusable nuclear shuttle (RNS) postions itself in orbit. A series of Earth shuttle missions delivers the parts to assemble the mission on the RNS' nose. First the space tug stack, then the payload cradle, the cradle is loaded with the luanr base modules, finally the landing gear kit.
from Lunar base synthesis study (1971)
Space Shuttle should being careful to stay within the safe area cast by the RNS shadow shield.
One of the first payloads delivered to the site of the future Lunar base will be "prime movers", which are lunar tractors
from Lunar base synthesis study (1971)
Among other things prime movers can be mounted with hoists, to assist unloading lunar base modules from the space tug. The hoist also has outriggers to help prevent the hoist from tipping over
from Lunar base synthesis study (1971)
A prime mover drags a wheeled module transport trailer into position next to the landed space tug. The lunar base module pivots so it is in a horizontal position over the trailer. The prime mover uses its hoist to lower the module onto the trailer.
The module on the trailer is dragged to the site of the lunar base by the prime mover. The mover uses its hoist to lift the module from the trailer, and lowers it into its final position as part of the growing lunar base. It then is attached to the rest of the base by its docking port.
from Lunar base synthesis study (1971)
Space tug lands. Garage module containing prime mover is tilted to be horizontal. Hatch/ramp of garage opens. Prime mover rolls down ramp onto lunar surface
from Lunar base synthesis study (1971)
Finally prime mover uses hoist to remove tank set from space tug. Tug then lifts off into orbit to return to LEO
from Lunar base synthesis study (1971)
Kits
Manipulators
Waldo arms for repair, satellite retrieval, and cargo handling. They are either bolted to a module or incorporated into a special manipulator submodule.
click for larger image
click for larger image
Artwork by Robert McCall. click for larger image
detail
Artwork by Robert McCall. click for larger image
detail
Note how red windows are angled downward, to give pilot a better view of the landing area Artwork by Robert McCall click for larger image
click for larger image
Landing Gear
This allows the space tug to land on the Lunar surface.
These are generally fixed because it turns out that stowage and deployment
of folded gear constitutes a formidable problem. As a general rule you want the gear to be long enough so that at touchdown
the main propulsion engine nozzles are at least two exit diameters from the lunar surface.
Since landing gear have appreciable mass under acceleration and exert stress when supporting the tug on the lunar surface, they should be attached to load-bearing structures. Which is usually not the propulsion module, who have walls made out of aluminum foil. Many lunar landing tug designs have the crew module on the bottom, so the landing gear is attached mostly to the load bearing CM frame, and only partially to the PM.
Fixed landing gear
Fixed landing gear
Fixed landing gear
Folding landing gear was later discarded as impractical
click for larger image
Cable Elevator
Used to lower crew to lunar surface if crew module is mounted on the top.
click for larger image
Long-range Extensible Antenna
For lunar missions larger antennae may be required for communication with Terra. These are about 1.8 m diameter.
click for larger image
Cover by David Hardy click for larger image
click for larger image
Artwork by David Hardy
Lunar Landing Heat Radiator
Standard radiators are mounted on the hull. Unfortunately while landed, thermal energy from the sun is reflected from the lunar surface and interferes with the hull radiators. So separate deployable radiators are required, facing the sky. About 28 m2 in two or four panels.
Sample Tugs
The study looked into ten different tug configurations, later expanding it to eleven. They are all assumed to have four LH2/LOX chemical engines with an exhaust velocity of 4,550 m/s and a combined thrust of 177,928 Newtons
They eventually narrowed it down to three configurations: Concept 1, Concept 5, and Concept 11. The main difference was how much propellant they carried. The secondary difference is the staging. Concept 1 is a single stage. Concept 5 is two stage, with both stages recoverable. Concept 11 is one-and-one-half stage. That is, it has a small propulsion module with a small propellant tank joined with a huge disposable tank set.
Space Tug Concepts
Concept
Propellant
Staging
C1
36,300 kg
Single Stage
C5
16,300 kg
Multi-Stage
C11
21,800 kg
One-and-One-Half Stage
Tug Specifications
Space (LEO) Mission
Lunar Mission NASA mode A
Lunar Mission NASA mode B
Component
C1
C5
C11
C1
C5
C11
C1
C5
C11
Staging
A1
B3
E4
A1
C1 D1
E1
A1
C1 D1
Intel Mod 1
1,500kg
1,500kg
1,720kg
1,720kg
Intel Mod 2
-
1,500kg
-
-
Crew Mod
-
-
4,170kg
4,170kg
Prop Mod 1
3,580kg
1,860kg
3,580kg
1,860kg
Prop Mod 2
-
1,860kg
-
1,860kg
Landing G
-
-
2,720kg
1,410kg
Payload
4,500kg
4,500kg
4,500kg
4,500kg
Total Inert
9,600kg
11,250kg
16,740kg
15,560kg
Propellant
36,470kg
33,100kg
25,630kg
24,090kg
Aux Con
270kg
540kg
1,360kg
1,360kg
Wet Mass
46,400kg
44,900kg
43,730kg
40,960kg
Start Accel
3.8m/s2
4.0m/s2
4.1m/s2
4.3m/s2
Mass Ratio
4.8
4.0
2.6
2.6
ΔV
7,160m/s
6,300m/s
4,270m/s
4,420m/s
Staging
A1 = Single-stage, recovered
B3 = Two-stage, both recovered
C1 = Two propulsion modules, one intelligence module, parallel operation
D1 = One propulsion module, one tank set, one intelligence module; operating as a single stage
E1 =
E4 =
Intel Mod 1 = intelligence module 1 mass
Intel Mod 2 = intelligence module 2 mass (if any)
Crew Mod = crew module mass (if any)
Prop Mod 1 = propulsion module 1 mass
Prop Mod 2 = propulsion module 2 mass (if any)
Landing G = landing gear mass (if any)
Payload = valuable cargo mass tug is pushing, pulling, or hauling in cargo modules
Total Inert = dry mass, or total mass less propellant
Propellant = propellant mass, sum of main engine LOX and LH2. Oxygen/fuel (O/F) ratio of 6 to 1 or six units of LOX per 1 unit of LH2
Aux Con = auxiliary consumables mass. Pressurization nitrogen and RCS fuel.
Wet Mass = total spacecraft mass
Start Accel = spacecraft acceleration with full propellant tanks
ΔV = delta V, spacecraft's total possible velocity change
Concept 1, Space mission, unmanned
C1 Space Mission from table above
Concept 1, Space mission, manned
Concept 1, Lunar stay mission, manned, crew module uppermost
Since tug is top-heavy (high center of gravity), landing gear needs a wider stance
Concept 1, Lunar stay mission, manned, crew module bottommost Since tug is bottom-heavy (low center of gravity) it can get away with landing gear with a narrow stance. Note swing-out engines
Concept 1, Lunar lander, unmanned, single tug for landing moderate cargo
Concept 1, Lunar lander, unmanned, dual tug transport for landing huge cargo
Concept 1 blueprint, page 1 of 4
click for larger image
Concept 1 blueprint, page 2 of 4
click for larger image
Concept 1 blueprint, page 3 of 4
click for larger image
Concept 1 blueprint, page 4 of 4
click for larger image
Gallery
click for larger image
Cover by David Hardy click for larger image
click for larger image
click for larger image
click for larger image
Artwork by David Hardy
Detail
From BBC Moonbase 3 (1973)
With gratuitous cone on top to jazz it up
This 1975 design from Dr. R. C. Parkinson was faintly seen in an article The Resources of the Solar System by Dr. R. C. Parkinson (Spaceflight, 17, p.124 (1975)). It was off in the corner of a small diagram. I had an old photocopy of the article in my files since the late 1970's. I supplied them to William Black and he made stunning images of Dr. Parkinson's lighter and tanker. These images attracted the attention of a former colleague of Dr. Parkinson, a certain Dr. James Garry. He kindly introduced us to Dr. Parkinson and provided contact information. Dr. Parkinson generously supplied us with never before published diagrams and commentary.
In a private correspondence, Dr. Parkinson told William Black and I: “As a matter of interest, the "Space Tug" & Lunar Lander were based on some earlier design work done in Europe when it looked as if a cryogenic Space Tug might be the European contribution to the Space Shuttle program (those were the days!).”
In his visualization, William Black added additional engineering details. He put more struts to support the reaction-control jets and liquid oxygen tanks. Dr. Parkinson's notes indicated that the manned capsule had its own propulsion, so William added a single gimbaled low-thrust engine. He also added: a high-gain antenna for communications and a radar dish; forward-facing view ports for visual orientation during docking maneuvers; four forward-facing and four aft-facing cameras to aid in docking procedures.
10.4 metric ton space tug. Diagram by Dr. R. C. Parkinson. Click for larger image
Extended tug for Lunar landing. Diagram by Dr. R. C. Parkinson. Click for larger image
Space tug re-envisioned by master artist William Black. Click for larger image
Space tug re-envisioned by master artist William Black. Click for larger image
Space tug re-envisioned by master artist William Black. Click for larger image
By way of comparison, spacecraft designed to use the SP-100 nuclear power system were allowed to irradiate the payload with a neutron fluence of 1013n/cm2 and a gamma dose of 5×105 rad, per mission.
FIGURE 10 click for larger image
NOTV-PBR De-H
Inert Mass
3,590 kg
Payload Mass
9,170 kg
Dry Mass
12,760 kg
Propellant Mass
15,500 kg
Wet Mass
28,260 kg
Mass Ratio
2.22
Propellant
Deuterium+Hydrogen
Exhaust Velocity
9,810 m/s
ΔV
7,800 m/s
This sample tug can be boosted into orbit on a Titan 32D7. But it is too long to be boosted by a Space Shuttle, since it won't fit in the cargo bay. Hydrogen and deuterium are annoyingly non-dense, so the tanks take up huge amounts of room.
From orbit the tug can deliver 9,500 kg (21,000 lb) of payload to GEO, one-way. It is a shame that it only burns 0.1% of the uranium 235 nuclear fuel and the rest is wasted. But since it is only 10 kilograms of fuel it is not too expensive.
FIGURE 9 click for larger image
NOTV-PBR NH3
Inert Mass
3,130 kg
Payload Mass
6,870 kg
Dry Mass
10,000 kg
Propellant Mass
16,100 kg
Wet Mass
26,100 kg
Mass Ratio
2.61
Propellant
Ammonia
Exhaust Velocity
4,900 m/s
ΔV
4,700 m/s
This design uses ammonia for propellant. On the minus side the delta-V is much less than the hydrogen design. On the plus side it can fit into a Space Shuttle cargo bay. Ammonia is much denser than hydrogen.
From orbit the tug can deliver 6,800 kg (15,000 lb) of payload to GEO, one-way. It will also only burn 0.1% of the uranium 235 nuclear fuel and waste the rest.
FIGURE 7
100 MWth reactor, pure hydrogen propellant, no restrictions on payload length
Nominal gas temperature is 3000K click for larger image
FIGURE 8
Same as Figure 7, but ammonia and hydrogen are used as propellant in an effort to increase the allowable payload length (tug and payload must be short enough to fit into Shuttle cargo bay).
Ammonia is used for first half of perigee burn. Hydrogen is used for the rest of the burns
The price is the payload mass is reduced by 15% click for larger image
Principal Constructural Parameters of the NOTV-PBR
ILS-017 "The Lark Ascending" is a typical inter-lunar shuttle operating in the Saturn system, specifically the route between Tethys and Dione. These shuttles use simple chemical rockets burning liquid hydrogen and oxygen, which is readily available all over the Saturnian moons as water ice.
As you can discover from my discussion of the "Ring Raider's" scifi background, the Tethys - Dione run (and the return route) has the following attributes:
TETHYS - DIONE RUN
ΔV required for Hohmann transfer
971 m/s
Hohmann launch window spacing
every 146 hours (6 days, 2 hours)
Transit time
28 hours (1 day, 4 hours)
click for larger image
click for larger image
click for larger image
click for larger image
click for larger image
Space Tug: Transport and Energy Module
TRANSPORT AND ENERGY MODULE
Hello, and welcome back to Beyond NERVA! Today’s blog post is a special one, spurred on by the announcement recently about the Transport and Energy Module, Russia’s new nuclear electric space tug!
This is a fascinating system with a lot of promise, but has also gone through major changes in the last year that seem to have delayed the program. However, once it’s flight certified (which is to be in the 2030s), Roscosmos is planning on mass-producing the spacecraft for a variety of missions, including cislunar transport services and interplanetary mission power and propulsion.
Begun in 2009, the TEM is being developed by Energia on the spacecraft side and the Keldysh Center on the reactor side. This 1 MWe (4MWt) nuclear reactor will power a number of gridded ion engines for high-isp missions over the spacecraft’s expected 10-year mission life.
First publicly revealed in 2013 at the MAKS aerospace show, a new model last year showed significant changes, with additional reporting coming out in the last week indicating that more changes are on the horizon (there’s a section below on the current TEM status).
This is a rundown of the TEM, and its YaDEU reactor. I also did a longer analysis of the history of the TEM on my Patreon page (patreon.com/beyondnerva), including a year-by-year analysis of the developments and design changes. Consider becoming a Patron for only $1 a month for additional content like early blog access, extra blog posts and visuals, and more!
TEM Spacecraft
Lower left: stowed configuration for launch, upper right: operational configuration. Image Roscosmos click for larger image
click for larger image
click for larger image
The TEM is a nuclear electric spacecraft, designed around a gas-cooled high temperature reactor and a cluster of ion engines.
The TEM is designed to be delivered by either Proton or Angara rockets, although with the retirement of the Proton the only available launcher for it currently is the Angara-5.
Secondary Power System
Both versions of the TEM have had secondary folding photovoltaic power arrays. Solar panels are relatively commonly used for what’s known as “hotel load,” or the load used by instrumentation, sensors, and other, non-propulsion systems.
It is unclear if these feed into the common electrical bus of the spacecraft or form a secondary system. Both schemes are possible; if the power is run through a common electrical bus the system is simpler, but a second power distribution bus allows for greater redundancy in the spacecraft.
The ID-500 was designed by the Keldysh Center specifically to be used on the TEM, in conjunction with YaEDU. Due to the very high power availability of the YaEDU, standard ion engines simply weren’t able to handle either the power input or the needed propellant flow rates, so a new design had to be come up with.
The ID-500 is a xenon-propelled ion engine, with each thruster having a maximum power level of about 35 kW, with a grid diameter of 500 mm. The initially tested design in 2014 (see references below) had a tungsten cathode, with an expected lifetime of 5000 hours, although additional improvements through the use of a carbon-carbon cathode were proposed which could increase the lifetime by a factor of 10 (more than 50,000 hours of operation).
Each ID-500 is designed to throttle from 375-750 mN of thrust, varying both propellant flow rate and ionization chamber pressure. The projected exhaust velocity of the engine is 70,000 m/s (7000 s isp), making it an attractive option for the types of orbit-altering, long duration missions that the TEM is expected to undertake.
The fact that this system uses a gridded ion thruster, rather than a Hall effect thruster (HET), is interesting, since HETs are the area that Soviet, then Russian, engineers and scientists have excelled at. The higher isp makes sense for a long-term tug, but with a system that seems that it could refuel, the isp-to-thrust trade-off is an interesting decision.
The initial design released at MAKS 2013 had a total of 16 ion thrusters on four foldable arms, but the latest version from MAKS-2019 has only five thrusters. The new design is visible below:
The first design is ideal for the tug configuration: the distance between the thrusters and the payload ensure that a minimal amount of the propellant hits the payload, robbing the spacecraft of thrust, contaminating the spacecraft, and possibly building up a skin charge on the payload. The downside is that those arms, and their hinge system, cost mass and complexity.
The new design clusters only five (less than one third) thrusters clustered in the center-line of the spacecraft. This saves mass, but the decrease in the number of thrusters, and the fact that they’re placed in the exact location that the payload makes most sense to attach, has me curious about what the mission profile for this initial TEM is.
It is unclear if the thrusters are the same design.
This may be the most interesting thing in in the TEM: the heat rejection system.
Most of the time, spacecraft use what are commonly called “bladed tubular radiators.” These are tubes which carry coolant after it reaches its maximum temperature. Welded to the tube are plates, which do two things: it increases the surface area of the tube (with the better conductivity of metal compared to most fluids this means that the heat can be further distributed than the diameter of the pipe) and it protects the pipe from debris impacts. However, there are limitations in how much heat can be rejected by this type of radiator: the pipes, and joints between pipes, have definite thermal limits, with the joins often being the weakest part in folding radiators.
The TEM has the option of using a panel-type radiator, in fact there’s many renderings of the spacecraft using this type of radiator, such as this one:
Image Roscosmos click for larger image
However, many more renderings present a far more exciting possibility: a liquid droplet radiator, called a “drip refrigerator” in Russian. This design uses a spray of droplets in place of the panels of the radiator. This increases the surface area greatly, and therefore allows far more heat to be rejected. In addition it can reduce the mass of the system significantly, both due to the increased surface area and also the potentially higher temperature, assuming the system can recapture the majority of its coolant.
This system was also tested on the ground throughout 2018 (https://ria.ru/20181029/1531649544.html?referrer_block=index_main_2), and appears to have passed all the vacuum chamber ground tests needed. Based on the reporting, more in-orbit tests will be needed, but with Drop-2 already on-station it may be possible to conduct these tests reasonably easily.
I have been unable to determine what the working fluid that would be used is, but anything with a sufficiently low vapor pressure to survive the vacuum of space and the right working fluid range can be used, from oils to liquid metals.
For more on this type of system, check out Winchell Chung’s incredible page on them at Atomic Rockets: https://projectrho.com/public_html/rocket/heatrad.php#liquidradiator I will also cover them in the future (possibly this fall, hopefully by next year) in my coverage of thermal management solutions.
Nothing is known of the reaction control system for the TEM. A number of options are available and currently used in Russian systems, but it doesn’t seem that this part of the design has been discussed publicly.
Additional Equipment
The biggest noticeable change in the rest of the spacecraft is the change in the spine structure. The initial model and renders had a square cross section telescoping truss with an open triangular girder profile. The new version has a cylindrical truss structure, with a tetrahedral girder structure which almost looks like the same structure that chicken-wire uses. I’m certain that there’s a trade-off between mass and rigidity in this change, but what precisely it is is unclear due to the fact that we don’t have dimensions or materials for the two structures. The change in the cross-section also means that while the new design is likely stronger from all angles, it makes it harder to pack into the payload fairing of the launch vehicle.
click for larger image
Image Twitter user Katya Pavlushcenko
The TEM seems like it has gone through a major redesign in the last couple years. Because of this, it’s difficult to tell what other changes are going to be occurring with the spacecraft, especially if there’s a significant decrease in electrical power available.
It is safe to assume that the first version of the TEM will be more heavily instrumented than later versions, in order to support flight testing and problem-solving, but this is purely an assumption on my part. The reconfiguration of the spacecraft at MAKS-2019 does seem to indicate, at least for one spacecraft, the loss of the payload capability, but at this point it’s impossible to say.
YaEDU Architecture
The YaEDU is the reactor that will be used on the TEM spacecraft. Overall, with power conversion system, the power system will weigh about 6800 kg.
Reactor
Image NIKIET click for larger image
Image NIKIET
Image NIKIET
Image NIKIET at MAKS 2013
The reactor itself is a gas cooled, fast neutron spectrum, oxide fueled reactor, designed with an electrical output requirement rather than a thermal output requirement, oddly enough (choice in power conversion system changes the ratio of thermal to electrical power significantly, and as we’ll see it’s not set in stone yet) of 1 Mwe. This requires a thermal output of at least 4 MWt, although depending on power conversion efficiency it may be higher. Currently, though, the 4 MWt figure seems to be the baseline for the design. It is meant to have a ten year reactor lifetime.
This system has undergone many changes over its 11 year life, and due to the not-completely-clear nature of much of its development and architecture, there’s much about the system that we have conflicting or incomplete information on. Therefore, I’m going to be providing line-by-line references for the design details in these sections, and if you’ve got confirmable technical details on any part of this system, please comment below with your references!
Fuel
The fuel for the reactor appears to be highly enriched uranium oxide, encased in a monocrystalline molybdenum clad. According to some reporting (https://habr.com/en/post/381701/ ), the total fuel mass is somewhere between 80-150 kg, depending on enrichment level. There have been some mentions of carbonitride fuel, which offers a higher fissile fuel density but is more thermally sensitive (although how much is unclear), but these have been only passing mentions.
The use of monocrystalline structures in nuclear reactors is something that the Russians have been investigating and improving for decades, going all the way back to the Romashka reactor in the 1950s. The reason for this is simple: grain boundaries, or the places where different crystalline structures interact within a solid material, act as refractory points for neutrons, similarly to how a cracked pane of glass distorts the light coming through it through internal reflection and the disruption of light waves undergoing refraction in the material. There’s two ways around this: either make sure that there are no grain boundaries (the Russian method), or make it so that the entire structure – or as close to it as possible – are grain boundaries, called nanocrystalline materials (the preferred method of the US and other Western countries. While the monocrystalline option is better in many ways, since it makes an effectively transparent, homogeneous material, it’s difficult to grow large monocrystalline structures, and they can be quite fragile in certain materials and circumstances. This led the US and others to investigate the somewhat easier to execute, but more loss-intensive, nanocrystalline material paradigm. For astronuclear reactors, particularly ones with a relatively low keff (effective neutron multiplication rate, or how many neutrons the reactor has to work with), this monocrystalline approach makes sense, but I’ve been unable to find the keff of this reactor anywhere, so it may be quite high in theory.
It was reported by lenta.ru in 2014 (https://lenta.ru/news/2014/07/08/rosatom/ ) that the first fuel element (or TVEL in Russian) was assembled at Mashinostroitelny Zavod OJSC.
Reference was made (http://www.atomic-energy.ru/news/2015/07/01/58052 ) in 2015 to the fuel rods as “RUGBK” and “RUEG,” although the significance of this acronym is beyond me. If you’re familiar with it, please comment below!
The TEM uses a mix of helium and xenon as its primary coolant, a common choice for fast-spectrum reactors. Initial reporting indicated an inlet temperature of 1200K, with an outlet temperature of 1500K, although I haven’t been able to confirm this in any more recent sources. Molybdenum, tantalum, tungsten and niobium alloys are used for the primary coolant tubes.
Testing of the coolant loop took place at the MIR research reactor in NIIAR, in the city of Dimitrovgrad. Due to the high reactor temperature, a special test loop was built in 2013 to conduct the tests. Interestingly, other options, including liquid metal coolant, were considered (http://osnetdaily.com/2014/01/russia-advances-development-of-nuclear-powered-spacecraft/ ), but rejected due to lower efficiency and the promise of the initial He-Xe testing.
Power Conversion System
There have been two primary options proposed for the power conversion system of the TEM, and in many ways it seems to bounce back and forth between them: the Brayton cycle gas turbine and a thermionic power conversion system. The first offers far superior power conversion ratios, but is notoriously difficult to make into a working system for a high temperature astronuclear system; the second is a well-understood system that has been used through multiple iterations in flown Soviet astronuclear systems, and was demonstrated on the Buk, Topol, and Yenesiy reactors (the first two types flew, the third is the only astronuclear reactor to be flight-certified by both Russia and the US).
Prototype Brayton turbine, Image Habr user Valentin from MAKS 2013
In 2013, shortly after the design outline for the TEM was approved, the MAKS trade show had models of many components of the TEM, including a model of the Brayton system. At the time, the turbine was advertised to be a 250 kW system, meaning that four would have been used by the TEM to support YaEDU. This system was meant to operate at an inlet temperature of 1550K, with a rotational speed of 60,000 rpm and a turbine tip speed of 500 m/s. The design work was being primarily carried out at Keldysh Center.
Prototype heat exchanger plates for turbine, image Habr user Valentin from MAKS 2013
The Brayton system would include both DC/AC and AC/DC convertors, buffer batteries as part of a power conditioning system, and a secondary coolant system for both the power conversion system bearing lubricant and the batteries.
As early as 2015, though, there were reports (https://habr.com/en/post/381701/ ) that RSC Energia, the spacecraft manufacturer, were considering going with a simpler power conversion system, a thermionic one. Thermionic power conversion heats a material, which emits electrons (thermions). These electrons pass through either a vacuum or certain types of exotic materials (called Cs-Rydberg matter) to deposit on another surface, creating a current.
This would reduce the power conversion efficiency, so would reduce the overall electric power available, but is a technology that the Russians have a long history with. These reactors were designed by the Arsenal Design Bureau, who apparently had designs for a large (300-500 kW) thermionic design. If you’d like to learn more about the history of thermionic reactors in the USSR and Russia, check out these posts:
This was potentially confirmed just a few days ago by the website Atomic Energy (http://www.atomic-energy.ru/news/2020/01/28/100970 ) by the first deputy head of Roscosmos, Yuri Urlichich. If so, this is not only a major change, but a recent one. Assuming the reactor itself remains in the same configuration, this would be a departure from the historical precedent of Soviet designs, which used in-core thermionics (due to their radiation hardness) rather than out-of-core designs, which were investigated by the US for the SNAP-8 program (something we’ll cover in the future).
So, for now we wait and see what the system will be. If it is indeed the thermionic system, then system efficiency will drop significantly (from somewhere around 30-40% to about 10-15%), meaning that far less electrical power will be available for the TEM.
The hydrogen is useful to shield most types of radiation, but the inclusion of boron materials stops neutron radiation very effectively. This is important to minimize damage from neutron irradiation through both atomic displacement and neutron capture, and boron does a very good job of this.
Current TEM Status
Two Russian media articles came out within the past week about the TEM, which spurred me to write this article.
RIA, an official state media outlet, reported a couple days ago that the first flight of a test unit is scheduled for 2030. In addition:
Roscosmos announced the completion of the first project to create a unique space “tug” – a transport and energy module (TEM) – based on a megawatt-class nuclear power propulsion system (YaEDU), designed to transport goods in deep space, including the creation of long-term bases on the planets. A technical complex for the preparation of satellites with a nuclear tug is planned to be built at Vostochny Cosmodrome and put into operation in 2030. https://ria.ru/20200128/1563959168.html
A second report (http://www.atomic-energy.ru/news/2020/01/28/100970) said that the reactor was now using a thermionic power conversion system, which is consistent with the reports that Arsenal is now involved with the program. This is a major design change from the Brayton cycle option, however it’s one that could be considered not surprising: in the US, both Rankine and Brayton cycles have often been proposed for space reactors, only to have them replaced by thermoelectric power conversion systems. While the Russians have extensive thermoelectric experience, their experience in the more efficient thermionic systems is also quite extensive.
“Creation of theoretical and experimental and experimental backlogs to ensure the development of highly efficient rocket propulsion and power plants for promising rocket technology products, substantiation of their main directions (concepts) of innovative development, the formation of basic requirements, areas of rational use, design and rational level of parameters with development software and methodological support and guidance documents on the design and solution of problematic issues of creating a new generation of propulsion and power plants.”
Work continues on the Vostnochy Cosmodrome facilities, and the reporting still concludes that it will be completed by 2030, when the first mass-production TEMs are planned to be deployed.
According to Yuri Urlichich, deputy head of Roscosmos, the prototype for the power plant would be completed by 2025, and life testing on the reactor would be completed by 2030. This is the second major delay in the program, and may indicate that there’s a massive redesign of the reactor. If the system has been converted to thermionic power, it would explain both the delay and the redesign of the spacecraft, but it’s not clear if this is the reason.
For now, we just have to wait and see. It still appears that the TEM is a major goal of both Roscosmos and Rosatom, but it is also becoming apparent that there have been challenges with the program.
Conclusions and Author Commentary
It deserves reiterating: I’m some random person on the Internet for all intents and purposes, but my research record, as well as my care in reporting on developments with extensive documentation, is something that I think deserves paying attention to. So I’m gonna put my opinion on this spacecraft out there.
This is a fascinating possibility. As I’ve commented on Twitter, the capabilities of this spacecraft are invaluable. Decommissioning satellites is… complicated. The so-called “graveyard orbits,” or those above geosynchronous where you park satellites to die, are growing crowded. Satellites break early in valuable orbits, and the operators, and the operating nations, are on the hook for dealing with that – except they can’t.
Additionally, while many low-cost launchers are available for low and mid Earth orbit launches, geostationary orbit is a whole different thing. The fact that India has a “Polar Satellite Launch Vehicle” (PSLV) and “Geostationary Satellite Launch Vehicle” (GSLV) classification for two very different satellites drives this home within a national space launch architecture.
The ability to contract whatever operator runs TEM missions (I’m guessing Roscosmos, but I may be wrong) with an orbital path post-booster-cutoff, and specify a new orbital pat, and have what is effectively an external, orbital-class stage come and move the satellite into a final orbit is… unprecedented. The idea of an inter-orbital tug is one that’s been proposed since the 1960s, before electric propulsion was practical. If this works the way that the design specs are put at, this literally rewrites the way mission planning can be done for any satellite operator who’s willing to take advantage of it in cislunar space (most obviously, military and intelligence customers outside Russia won’t be willing to take advantage of it).
The other thing to consider in cislunar space is decommissioning satellites: dragging things into a low enough orbit that they’ll burn up from GEO is costly in mass, and assumes that the propulsion and guidance, navigation, and control systems survive to the end of the satellite’s mission. As a satellite operator, and a host nation to that satellite with all the treaty obligations the OST requires the nation to take on, being able to drag defunct satellites out of orbit is incredibly valuable. The TEM can deliver one satellite and drag another into a disposal orbit on the way back. To paraphrase a wonderful character from Sir Terry Pratchett (Harry King)“They pay me to take it away, and they pay me to buy it after.” In this case, it’s opposite: they pay me to take it out, they pay me to take it back. Especially in graveyard orbit challenge mitigation, this is a potentially golden opportunity financially for the TEM operator: every mm/s of mission dV can potentially be operationally profitable. This is potentially the only system I’ve ever seen that can actually say that.
More than that, depending on payload restrictions for TEM cargoes, interplanetary missions can gain significant delta-vee from using this spacecraft. It may even be possible, should mass production actually take place, that it may be possible to purchase the end of life (or more) dV of a TEM during decommissioning (something I’ve never seen discussed) to boost an interplanetary mission without having to pay the launch mass penalty for the Earth’s escape velocity. The spacecraft was proposed for Mars crewed mission propulsion for the first half of its existence, so it has the capability, but just as SpaceX Starship interplanetary missions require SpaceX to lose a Starship, the same applies here, and it’s got to be worth the while of the (in this case interplanetary) launch provider to lose the spacecraft to get them to agree to it.
This is an exciting spacecraft, and one that I want to know more about. If you’re familiar with technical details about either the spacecraft or the reactor that I haven’t covered, please either comment or contact me via email at beyondnerva@gmail.com
We’ll continue with our coverage of fluid fueled NTRs in the next post. These systems offer many advantages over both traditional, solid core NTRs and electrically propelled spacecraft such as the TEM, and making the details more available is something I’ve greatly enjoyed. We’ll finish up liquid fueled NTRS, followed by vapor fuels, then closed and open fueled gas core NTRs, probably by the end of the summer
If you’re able to support my efforts to continue to make these sorts of posts possible, consider becoming a Patron at patreon.com/beyondnerva. My supporters help me cover systems like this, and also make sure that this sort of research isn’t lost, forgotten, or unavailable to people who come into the field after programs have ended.
Space tug concept by Frank Tinsley. Tug has grapples and grippers on its stern. The four square plates around its waist are ion drive units (The crewman's hatch is unfortunately placed right in the line of fire of one of the ion drives).
The petals near the bow are heat radiators. Sadly the radiators are spaced too closely. In reality one would want two radiators at 180° or at the most four radiators at 90°. The arrangement shown would have the heat from one radiator impinging on its neighbors.
And at the tip of the pointed prow would be the tiny nuclear reactor. It would be nice to include a small shadow shield to protect the crew from nuclear radiation.
The ULA's Advanced Common Evolved Stage (ACES) is basically a ULA standard propulsion bus. The idea is to avoid relying upon gigantic expensive launch vehicles such as the Ares_V (not to mention the fact that the Ares V doesn't exist yet). ULA proposes using the tiny ACES refueled with the miracle of orbital propellant depots so that smaller inexpensive commercial launch vehicles can be used instead of the expensive Ares V.
Without the support of orbital propellant depots, the ACES would have to lug along all the propellant needed for the entire freaking mission. Since Every gram counts, this would bloat the ACES design to the point where there was no choice but to use the pricy Ares V.
According to the second ULA report: "This strategy leads to high infrastructure utilization, economic production rates, high demonstrated reliability and the lowest possible costs." It will also help develop the infrastructure needed not only for Lunar operations, but also missions to Near Earth Asteroids and Mars. Establishing a propellant depot at the Terra-Luna L2 point will assist exploration outside of the Terra-Luna system. Since 75% of the mass being boosted to LEO is propellant, it is cheaper to use commercial launch vehicles. This also encourages conducting lunar exploration as a continuous process instead of a series of disconnected missions.
In addition to using propellant depots, the strategy includes using a common propulsion stage, the ACES module. Ideally the various components of the ACES should be commodities, that is, be off-the-shelf components available from several companies instead of just from ULA or NASA.
ACES 41
"41" means it carries 41 metric tons of propellant (liquid oxygen and liquid hydrogen)
The ACES module uses its basic liquid hydrogen/liquid oxygen for main propulsion, propellant pressurization, RCS, power from fuel cells, and heat radiators. By using LH2/LOX for everything, it reduces the number of points of failure. E.g., helium tanks to pressurize the propellant, MMH/NTO for RCS, and solar panels for power are just three more systems that can break. ULA's buzzword for this concept is Integrated Vehicle Fluids.
This makes the ACES module a valuable component of a modular design spacecraft. It is doing its level best to be an "Instant spacecraft kit - just add payload".
The basic unit is the ACES 41 unit, containing 41 metric tons of propellant (liquic oxygen and liquid hydrogen). The "stretched" version, the ACES 71 contains, you guessed it, 71 metric tons of propellant. The stretching of the design is possible since all the subsystems are concentrated on the aft-mounted equipment deck, just forwards of the engines. All that needs to be done is add side-wall segments. Due to the clever planning of the orbital propellant network, only a 41 and 71 metric ton design are required. They can handle all the necessary tasks in the mission plan.
The tank has a diameter of 5 meters. It drastically reduces cryogenic propellant boil-off by a variety of methods: tank geometry, low conductivity tank structures, passive thermal protection, and vapor cooling. In addition the cryogenic propellant is subcooled so it can last longer. The tank's exposed surface is covered by a thick multi-layer insulation blanket, to reduce heating from Terra or Sol.
As preveviously mentioned, the ACES has no helium pressurization system, hydrazine fed RCS, nor solar power panels. Instead these functions are performed using the already present supply of LH2/LOX.
But the major feature is the tanks are designed to be refilled with propellants once in space. Practically no existing spacecraft can do this, but it is a sine qua non for utilizing orbital propellant depots.
In the lunar mission plan, the ACES module will be used for four primary in-space mission functions:
As service module propulsion system for an ACES 41/Orion spcecraft
As the descent propulsion system for an ACES 41/Altair lunar lander
As an ACES 71 propellant tanker
As a component of an ACES 71 propellant depot (14.6 metric tons LH2 capacity)
ACES/Orion spcecraft
ACES/Orion spcecraft
Add to an ACES 41 an environmental control and life support system (ECLSS) Module and an Orion Crew Module, and you have an Orion spacecraft. The ACES 41 is acting as a "service module" for the Orion Crew Module. The ACES provides the propulsion, half of the RCS (other half is on Orion), electrical power, and heat radiator. The ECLSS provides the Orion Crew Module with N2 replenishment, CO2 scrubbing, and voice communication.
ACES/Tanker
ACES/Tanker
This is a "stretched" version of the ACES 41, the ACES 71 contains 71 metric tons of propellant. It will be used as a propellant tanker (71 metric tons of propellant) used to supply depots, and as the LH2 storage section of an depot (14.6 metric tons of liquid hydrogen).
ACES/Depot
ACES/Depot
L2 Orbital Propellant Depot with Orion and Altair spacecraft docked.
This is an ACES 41 mated to a modified ACES 71. The ACES 71 section will be used for LH2 storage, and the ACES 41 section will be used for LOX storage.
The modified ACES 71 component has the bulkhead between the liquid hydrogen (LH2) and liquid oxygen (LOX) shifted in order to maximize LH2 storage. The engines are removed and a deployable sunshield is installed.
The depot has multiple interfaces for transferring propellant to and from the depot tanks. It can also supply power and support services to docked vehicles for extended periods.
Yes, I am aware that other experts are of the opinion that L1 is superior to L2 when it comes to siteing Terra-Luna propellant depots. However ULA wants the depot at L2 to assist missions to Mars and other points outside the Terra-Luna system. An L2 depot can replace an L1 depot, but an L1 depot cannot replace an L2 depot.
The entire depot structure (both ACES 41 and ACES 71) is launched with the ACES 71 section empty, so the external insulation can be optimized for vacuum operations (as a depot) instead of needing foam cladding to deal with atmospheric heat. Since the ACES 71 empty shell, it has a mass of only 12 metric tons.
After launch into LEO, the ACES 41 section will have about 20 metric tons of propellant left. It will transfer the residual LH2 into the ACES 71 tank, vent the local tank, then fill the newly emptied local tank with the residual LOX. Remember that the ACES 71 section is for LH2 storage while the ACES 41 section is for LOX.
The depot will become the LEO orbital depot. Subsequent launches will fill the tanks and keep them filled.
The second depot launched into LEO is destined to be installed at L2.
Once it reaches LEO, the ACES 41 section will be refueled with both LH2 and LOX, since it will be used as a tug. The ACES 71 section will just be filled with LH2 since it is basically payload. The ACES 41 section transports the entire depot to L2.
The L2 depot will be kept topped up by periodic visits from a propellant tanker based on an ACES 71. EAch LEO to L2 trip will deliver 29 metric tons of propellant to the depot.
Temperature conditions are very different in LEO as compared to L2. LEO is a hot place, with thermal radiation from Terra heating up the depot tanks and boiling off propellant. L2 is relatively cold.
The depot uses a passive thermal protective system. It deals with the problem by being designed to primarily boil-off and vent gaseous hydrogen (since it has about ten times the thermal capacity of oxygen). It will boil-off about 27 kilograms a day. The liquid hydrogen is used to cool off the liquid oxygen, in other words. As it turns out, objects in LEO need lots of RCS action to keep the depot in its assigned spot and not falling out of orbit to a fiery doom or something like that. The boiled-off gaseous hydrogen can be used in RCS attitude jets to prevent that unhappy fate (Isp of 390 seconds, about 2 to 3 m/s of delta V per day). The boil-off and station-keeping needs can be balanced.
At L2 the heating rate is far less, boil-off of only one kilogram a day or so. Luckily at quasi-stable L2 the station-keeping requirements are also low.
The LEO Depot will lose about 10 tons of liquid hydrogen a year. However, since the plan has over 300 tons of propellant transfered through the LEO Depot in a year, the heating loss is less than 4%.
ACES/Altair
For Lunar operations, a belly lander spacecraft based on the ACES 41 propulsion bus will be used. This is called the Dual Thrust Axis Lander (DTAL) since it has two thrust directions: aft like a tail-sitter, and dorsal like a belly-lander. The DTAL-R is a robot controled cargo landing vehicle, the DTAL-Crew is a manned cargo landing vehicle.
ACES/Altair
The ACES 41 is mated to a cargo bay, then topped with either a (robot) Lunar Cargo Module or a (crewed) Crew Ascender Module. Banks of 4,500 Newton lateral (hover) thrusters and belly-landing gear are added for final hover and landing phases.
Note how Altair Crew has aft hover thrusters mounted on thrust frame, while Altair Cargo has them mounted on the propellant tank.
Due to the tall propellant tank and long high-expansion area nozzles, the cargo would be over six meters off the lunar surface if the spacecraft landed on its tail. That is a long way to winch down cargo.
Making the spacecraft a belly lander puts the cargo conveniently much closer to the surface.
Basic Element Mass Summary
Vehicle Element/Assembly
Dry Mass metric tons
Propellant metric tons
Basic ACES 41
5
40.8 @ 5.25
Basic ACES 71/ Tanker
5.5
70.7 @ 5.0
Orion Command Module
6.0
Orion ECLSS Module
2.0
Orion Crew & Associated Cargo
1.0
Altair Cargo/Descent Module
2.0
Altair Ascender
3.0
4.0 @ 6.0
Altair Light Cargo
3.5
Altair Heavy Cargo
20.0
Depot Systems Module
3.0
ACES Depot (2 docked ACES)
12.5
121
Vehicle Assembly Mass & Performance Summary
Vehicle Assembly
Total Mass metric tons
Delta V Capacity m/s
Nominal Delta V Demand m/s
Nominal Residual Propellant
ACES/Orion @ LEO Departure
54.8
5,600
4,400
5
ACES/Orion @ L2 Departure
17.0
1,400
800
1.4
ACES /Altair @ LEO Departure
58.3
6,300
3,500
13
ACES/Altair @ L2 Departure
59.0
5,000
2,900
16
ACES/Altair Cargo @ LEO Departure
74.8
3,900
3,500
3.0
ACES/Altair Cargo @ L2 Departure
66.5
Variable
2,900
4.0
ACES/Tanker @ LEO Departure
76.2
11,350
3,500
29.0
Ascender @ Lunar Departure
7.5
2,900
2,650
0.4
Lunar Transport Operations
Blue arrows are the Logistics Stream
Green arrows are the Crew Stream
Red arrows are propellant transfer
Yellow numbers are Task IDs
In ULA's master plan there are seven "tasks."
Tasks 1, 2, and 3 are the Logistics Stream, they are handled by commercial space services. They are mostly concerned with the orbital propellant depots.
Tasks 4, 5, 6, and 7 are the Crew Transport Stream, and they are handled by NASA with help from contractors. They are mostly concerned with astronauts and exploration missions.
The important point is that the two streams are not closely coupled, they need only loose choreography. So the commercial services keeping the depots topped up do not need to keep close tabs on what NASA is doing. They only need enough cooperation to ensure that there will be propellant at the depot when NASA needs it.
The Logistics Stream
Trying to do space missions without propellant depots can waste lots of expensive equipment and propellant. With propellant depots you always get the maximum value out of each vehicle and drop of propellant.
Without depots, each spacecraft stage is designed for the worst-case scenario. If the payload turns out to be lighter than expected or there is a favorable launch window or if the stage performs better than you feared, the end result is you have to throw away tons of expensive propellant at staging. What a waste! But with depots, if you have left over propellant, you can load it into the local depot at the end of the trip leg. ULA says "The excess performance at each step of the way makes propellant a kind of currency that can be applied to downstream needs." In other words: waste not, want not.
Task 1 and Task 2
TASK 1: Move propellant from surface into LEO Depot
Basically keeping the LEO depot topped off. The baseline plan is delivering about 30 metric tons per month.
This can be done by a wide range of launchers and providers, which is a good thing. Insuring against interruptions of service by a single provider is always prudent. This will be a great area for startup companies, since accidentally blowing up a tank of liquid hydrogen is no great loss. At least compared to accidentally blowing up a $200 million communication satellite. With competition launch prices will drop with time.
TASK 2: Move propellant from LEO Depot into L2 Depot
Because the LEO environment is so thermally hot compared to L2, you want to move propellant to L2 as fast as possible before it all boils away. Use it or lose it.
Given the capacity of the LEO Depot, the baseline is a propellant transfer to L2 roughly every other month. This can be done with a dedicated ACES Tanker, or with the left-over propellant from Altair or Orion visits. Since these craft can make the trip to L2 with propellant to spare, each trip is also a small tanker mission.
For dedicated Tanker missions, roughly every third tanker launch will continue on to the L2 Depot (after topping off their tanks with 30 or 50 tons of propellant from the LEO Depot, depending upon the launcher). The Tanker then departs for L2 in a low delta V trajectory that consumes about 41 metric tons. The remaining 29 metric tons or so are added to the L2 Depot.
There will be room for competition. If one of the service providers creates a tanker that uses an ion drive or other system allowing more propellant to be shipped, they will have a competitive advantage.
Task 3
TASK 3: Move Altair and cargo to lunar surface
The most complex of the Logistics Stream commercial tasks is landing all the cargo on Luna. Before you can send any astronauts you are going to have to deliver tons and tons of cargo: rovers, radiators, solar power systems, gas handling and compressor systems, excavating equipment and other bulky cargo and consumables.
Altair robot cargo vehicle discharging from the cargo stack, one rover at a time. The top of the ramp is only one meter above the lunar surface.
The Altair's landing gear has wheels, so that the vehicle can be towed to a tank farm or something like that.
The robot ACES/Altair is boosted into LEO by a Delta IV HLV rocket. Altair has a mass of 36 metric tons. After refueling at LEO Depot it travels to L2, delivering about 30 tons of combined vehicle and cargo mass. The usual cargo will probably be less than this, meaning there will be residual propellant that can be added to L2 Depot's stash. If the Altair is intended to be cached at L2 for future crew use, it will deposit all its propellant into the depot for efficient long term storage.
Before the ACES/Altair performs a lunar landing it will load or top off its propellant tanks, including the Ascender tanks (if Ascender is present). The Altair fully loaded can deliver a combined mass of vehicles (such as the Ascender), cargo, and residual propellant greater than 40 metric tons to the lunar surface.
The ACES/Altair proper never returns from the lunar surface, though the separate Ascender can transport astronauts back to L2.
On the surface, the ACES/Altair's propellant tanks can act as storage tanks. LH2/LOX is not very useful as propellant at a lunar base, but it is very valuable to feed fuel cells, or to store the output of regenerative fuel cells. The tanks can also be fed from residual propellant from future ACES/Altair landings. "Tank farms" of landed ACES/Altair can be made, since the vehicles can be towed to be adjacent to other vehicles due to the little wheels on the landing gears.
As a nice bonus, the Altair will be tested again and again via robot landing, so all the dangerous bugs can be worked out before it is used to land actual human beings.
The Crew Stream
TASK 4: Move crew to L2
The Crew Stream will be under NASA control, but will use much of the same equipment. Especially the ACES 41.
Once the robot Altairs have delivered enough supplies and equipment to the lunar base site such that astronauts can actually live there, it is time to transport the crew to luna.
The ACES/Orion crew vehicle will be launched on an Atlas booster. The booster can deliver 11 metric tons of mass to LEO, enough for an ACES 41 and an Orion. The ECLSS Module, cargo, and crew will be delivered on a separate flight.
Once assembled and fueled, the ACES/Orion can travel to L2 in about 4 days using a high delta-V transfer. Upon arrival all propellant is transferred to the L2 Depot because it has better boil-off prevention. The Orion's station keeping, power, and other services are provided by the depot.
TASK 5: Move crew from L2 to lunar surface
A previously delivered crew ACES/Altair with an ascender module is prepped for the descent. Very little cargo will be carried because [A] there is a mountain of cargo at the site already, delivered by robot Altairs, [B] you want the crew Altair to have a very high performance margin so it can escape from disasters during the descent and [C] the residual propellant also sets the duration of the surface stay, since the propellant is also the astronaut's breathable oxygen and fuel for the fuel cells.
With a nominal landing, there should be about 10 metric tons of residual propellant.
The descent is powered by the main RL10 engines. As the lunar surface nears, the Altair rotates and switches to the banks of 4,500 Newton lateral thrusters to hover and land.
Once landed, the side cargo hatches can be opened, and the "bomb-bay"style airlock deployed from the belly.
If an emergency occurres during the descent, the ascender module can separate and carry the crew back to L2 while the Altair falls to its doom.
DTAL descent trajectory
DTAL descent with emergency abort
Ascender separates and carries crew back into orbit. Decender crashes onto lunar surface
Landed ACES/Altair vehicle
The cargo elevator allows the crew to access the cargo (shown in violet) at chest height.
Foil area at bottom is the "bomb-bay" inflatable airlock.
The belly-landing aspect plus the forward downward facing windows give the pilot an unimpeded view of the landing site. With tail landers, the pilot cannot see the landing site at all.
The crew cabin accommodates four astronauts on the lunar surface. It includes a large soft-shell airlock at ground level. This is an alternative to the "bomb-bay" type inflatable airlock.
The DTAL can be equipped to be a wet workshop, retrofitting the spacious propellant tanks to be habitat modules for a lunar base.
TASK 6: Move crew from lunar surface to L2
The Ascender module uses banks of 4,500 Newton lateral engines burning the same LH2/LOX that everything else uses. The lateral engine propellant tanks are only filled shortly before lift-off, since the main tanks have superior boil-off resistance. This does lose a couple of kilograms of propellant due to tank chilldown, but more would be lost by boil-off.
Each bank has 12 small engines that are throttled to about 30% power. They are located such that they can accommodate substantial differences in the ascender's center of gravity (easy with 12 small engines, hard with one large engine). The exhaust is angled such that it does not incinerate the Altair that is left behind, future expeditions can use it.
The ascender travels to the L2 Depot, docks, and dumps its residual propellant into the depot. It will be reused, being attached to a newly arrived ACES/Altair.
Departing Ascender vehicle
The vehicle has a clean separation plane
The lateral thrusters are placed so to minimize the exhaust plume damaging the left-behind section.
TASK 7: Move crew from L2 to Terra
The crew from the Ascender module transfer to the ACES/Orion that brought them. The tanks are filled and it travels to Terra. It only needs 10% of propellant capacity for the trip. The delta V cost is so modest that the trajectory can be initiated with the RCS instead of the main RL10 engines, not that you'd want to do that.
Space Tug: William Black
Artwork and design by William Black. Click for larger image.
A timeline for my future history is to be found here: Timeline
In the System States Era asteroid mining operations thrive throughout the asteroid belt and among the moons of Jupiter and Saturn the Martian terraforming program has left legacy: a sprawling archipelago of island stations and industrialized moons, Bernal Sphere's and O'Neill Cylinders, Spindle and Wheel cities, and a population of humanity growing into the millions. Space colonies are independent city-states and trade is their lifeblood. Entire generations are born and live their lives in spinning cylinders, bubbles, and torus shaped habitats, harvesting, mining, and fabricating all they need from the environment of the outer solar system.
Orion and Medusa style nuclear pulse freighters haul payloads of raw materials across interplanetary distances, while nuclear orbital transfer vehicles (OTV’s) provide light freight and passenger service between space habitats in Jupiter and Saturn orbit.
For a table of Delta V required for travel using Hohmann orbits among the moons of Saturn see Why Saturn on Winchell Chung’s Atomic Rockets site. Scroll a little further down the page and you will find a Synodic Periods and Transit Times for Hohmann Travel table for Moons of Saturn.
The abundance of various chemical ices for use as reaction mass among the moons of the outer system gas giants makes NERVA an excellent option for commercial application. Nuclear thermal rockets provide excellent efficiency; they also impose certain operational restrictions. The engine emits significant levels of radiation while firing and even after shut-down, and while passengers and crew are protected by the engines shadow-shield and hydrogen tanks, you wouldn’t want to point the engine at other spacecraft or space platforms. During the U.S. nuclear thermal rocket engine development program NFSD contractors had recommended that no piloted spacecraft approach to within 100 miles behind or to the sides of an operating NERVA I engine. The only safe approach to a spacecraft with a NERVA engine is through the conical “safe-zone” within the radiation shadow created by its shadow-shield and hydrogen tanks. Docking NERVA propelled spacecraft to a space station or habitat is problematic because structures protruding outside the conical safe-zone can reflect radiation back at the spacecraft, irradiating the passengers and crew.
These facts impose a set of mandatory operational parameters and flight rules for nuclear operation. An exclusion zone for nuclear propulsion (60 kilometers minimum) is imposed around every orbital platform. Orbital Guard units would hold broad discretionary powers—violate an exclusion-zone or disregard traffic-control and the local guard will cheerfully vaporize your spacecraft. No warning shots, no second chances. A crew that violates flight rules doesn’t live long enough to worry about fines or attorney fees, and the public’s time and funds are not wasted with trials of incompetent captains and crew.
Nuclear Freighters “park” propulsion modules in station-keeping orbit with their destination, and the freight/passenger module undocks, separating from its nuclear propulsion module, proceeding to birthing under thrust of a chemical maneuvering unit.
Because the nuclear propulsion modules are valuable, and are potentially deadly missiles if mishandled — codes to access the autonomous flight computer and possession of the nuclear propulsion module are temporarily handed over to the local orbital-guard for safe keeping.
For a good example of Space traffic control see the entry on Winchell Chung’s Atomic Rockets site here and scroll down to quote from Manna by Lee Correy.
At this point in my future history, 750 years post Martian colonization, spacecraft are essentially stacks of common modules which can be swapped out to suit application.
Independent Operators, like today’s truckers, might “own” only the CMOD (Command Module) with other units being leased per flight. The Freight Carrying Structural Spine, essentially a rigid frame with mountings for cargo modules, might be leased by the shipper and loaded with cargo (but owned by a separate freight transport supplier) and since different payloads mass differently it might be the responsibility of the shipper to lease suitable nuclear and chemical propulsion modules rated to the task. Passenger transport services might likewise lease passenger modules of varying capacity and Transport Brokerage firms would coordinate freight and passenger payloads assigned to same destinations and offer these in an open-bid market.
Propulsion Modules
Different payload masses require different propulsion module configurations, the light freighter detailed here requires only a single Solid-Core nuclear thermal rocket. A heavy payload freighter might use clusters of solid-core, or Open-Cycle Gas-Core, nuclear thermal rockets.
Design
3D models are my own conception based on various real-world proposals.
As research for the passenger/crew module I studied the POTV (Personnel Orbital Transfer Vehicle) pages 86-96 from NASA Technical Memorandum 58238 Satellite Power System: Concept Development and Evaluation Program Volume VI1 -Space Transportation available: here.
Propulsion for my light freighter is a Solid-Core NERVA Derivative, details available here.
In conversation Winchell Chung suggested the modification Cascade-Vanes: details available here.
Throughout the series I referred several times to a reference design for a cargo tug. That was put together using what might kindly be described as rectal numbers, assuming a tankage factor of 6% and 1.5 tons of remaining structure.
I've gone back and run a preliminary estimation using a more detailed approach. In the process I created a spreadsheet that will allow users to enter their own values if desired. Errors are likely so use at your own risk; make a copy if you want to make changes.
My little tug ended up just under 5 tons dry mass, 6.5kW power, 62 tons fuel capacity. The initial estimate was pretty close.
I assumed the use of RL-10B-2 engines with modifications to allow unlimited restarts (Mr. Wolfe changed this to the RL10A-4-2, because the RL-10B-2 has too much mass). Most of the mass estimation relationships came from a U of Maryland slide series with some references from TU Delft and http://www.braeunig.us/. My estimates for cryocoolers are primitive at best, but the mass and power values are for a real off-the-shelf unit and should be reasonably accurate for cis-lunar space in the 50-100 ton fueled mass range. I also adjusted the thrust structure value to account for strength in two dimensions plus lunar landing gear; a note in that cell explains how to omit either option.
Fuel hauling is assumed to use the craft's main propellant tanks. Cargo is assumed to be symmetrically attached to the thrust structure with low center of gravity. For cargo that is not being landed on the moon, attachment via a docking ring on the nose of the ship is also an option if a single bulky object is being transported.
This more precise model comes to 4.95 tons of dry mass and 62 tons of fuel. All payloads assume 5% dV margins. It can land a 20-ton payload on the surface of the Moon and return it. It can deliver 50 tons of cargo to low Mars orbit and return empty. A one-way trip from LEO delivers 39 tons to EML1 or 46 tons to EML2.
Missions
Mission
Payload
Land payload on Lunar surface and return it
20,000 kg
Deliver payload to low Mars orbit and return empty
50,000 kg
One-way to EML1
39,000 kg
One-way to EML2
46,000 kg
Fuel for a trip from EML1/2 takes two lunar surface fueling trips. Fuel for a trip from LEO takes three fueling trips from EML1/2 (requiring six surface trips). This is determined by engine Isp and the mass relationships used in the model, so the same is true if the vehicle is scaled up or down with similar thrust to weight ratio.
I included three alternate configurations. The most relevant is sized to fit a standard Falcon payload fairing; 2.06t dry mass, 24.6t fuel capacity and would be launched engine-up empty on a 9 or fueled on a reusable heavy. Two much larger craft (120t and 500t fuel capacity) are presented as examples; the large craft could be launched on an Ariane V, Proton M or SLS block 1 with diameter as the main constraint. This would be a reasonable propellant depot in its own right. The huge craft would require an SLS block 2 due to both diameter and mass, plus a substantial supply of guts, stupidity or cash.
Improvements to the model would be a better look at masses for a sunshield, cryocooler, payload hardpoints and docking system, as well as a frame with thermal/fragmentation protection between engines. A discrete tank model instead of a mass estimate based on volume is something I've done in another sheet and may migrate to this one in the future. A further set of refinements would be a look at ULA's integrated vehicle fluid management tech including gaseous H2/O2 lines for RCS thruster packs, combustion engine for reserve power and an electrolysis unit for converting waste water or payload water into additional fuel. I'd like to see a table or graph of total dV from surface to EML1/2 for a range of thrust to weight ratios as well. Lastly, some kind of mass estimate for a reusable (non-ablative) heatshield for the trip to LEO or LMO would be useful. I have not included estimates for any trip with aerobraking so the sheet would have to be reworked to account for that capability.
I need to continue on the topic of electric propulsion. The previous post was a lot of words but not a lot of meat. I felt it was too weak to stand alone, particularly as a part of this series where I am trying to focus on a realistic near-term plan for cargo transport. If you are interested in more background information I'd start with the Wikipedia page on electric propulsion and follow up with a look at the Atomic Rockets engine page. Another good look in the context of interplanetary travel is this paper (Hellin), while a deep look at relevant equations can be had in this paper (Keaton).
One interesting result is a rule of thumb to find required thrust given average acceleration. Google failed me on finding an exact solution, but it looks like there is a simple approach that is within 1% of the target value.
I eventually settled on a design massing 33.4 tons, 1.6 MW solar-electric, Isp 6,000 and 40 N thrust using PIT thrusters with water propellant.
Let's look at an electric tug with payload comparable to my reference tug, both a solar PV and a nuclear version. The main routes for this vehicle will be between LEO, GEO, EML1/2 and Mars orbit. Unlike the chemical tug we can't get much out of the Oberth effect, so the delta-V requirements are higher. Just like the chemical tug, the LEO to EML1 leg has the highest dV requirements (about 7km/s), so if we design for that case then the other trips will be faster, carry more cargo or burn less propellant.
A key design factor here is trip time. If we throw enough power at the problem we can get to EML1 in the same amount of time as a chemical rocket, but that is a poor use of the mass. We need to decide how long we are willing to wait for the cargo and design enough thrust into the ship to make the trip in that span. I'm going to suggest four weeks to EML1 as a reasonable compromise, so let's see the consequences of that choice.
Estimating thrust requirements for average acceleration
To apply 7km/s of delta-V in 28 days we need to make an average acceleration of 2.89 mm/s. To allow some wiggle room let's assume we can only thrust 90% of the time, meaning now we need 3.22 mm/s. Since this is our average acceleration, we need to find either the initial or final acceleration to find the thrust of the propulsion system. To do that we will first need to know the vehicle's propellant mass fraction, so let's take a few test cases at Isp of 3000, 6000 and 10,000.
Propellant mass fraction (Mf) is equal to 1 - e ^ (- dV / Ve), where dV in this case is 7000 m/s and Ve is Isp * g. See the rocket equation page for more details.
Isp 3000 -> Mf of 0.21175
Isp 6000 -> Mf of 0.11217
Isp 10000 -> Mf of 0.06890
It would be nice if the average acceleration also matches up with the midpoint of fuel consumption, but somehow I doubt it. Let's find out.
Given a dry mass of, say, 10 tons and an Isp of 3000, the fueled mass is ( 1 / ( 1 - Mf ) ) * dry mass, or 12.686 tons. When half of the fuel is burned the craft masses 11.343 tons. The target acceleration is 0.00322 m/s, so the required thrust is 36.52 newtons. Thrust is mass-flow (mdot) times exhaust velocity, so mdot is 1.2414 grams per second. That rate of propellant consumption would require 25 days to empty the tank, or 27.825 days after accounting for our 90% duty cycle.
That surprises me. It's not exact but it is close enough for exploratory work. The case of 10,000 Isp works out to 27.947 days, so it looks like this rule of thumb is valid across a fair range of Isp values. I also spot-checked some different mission dV values and found similar agreement, always within 1%. If anyone out there knows of an exact solution I would love to hear it.
To calculate this yourself you need your mission dV, Isp, thrust duration and a test mass. If you set the test mass to 1kg (or 1t) then you can find a multiplier to use for different dry masses. The relationships are linear.
The required acceleration a will be dV in meters per second divided by thrust duration in seconds.
First, find fuel mass fraction, which is 1 - e ^ (- dV / Ve).
Convert to dry mass fraction Md, which is -Mf + 1
Convert to the 'gear ratio', which is simply 1 / Md
Multiply by dry mass M1 to get fueled mass M0 and note this value.
Find the fuel mass by taking M0 - M1 and note this value.
Find the 'halfway point', which is half the fuel mass plus M1; let's call this Mh.
Find the thrust F, which is Mh * a. This is the value you are looking for.
Find mdot, which is thrust divided by exhaust velocity, or F / (g * Isp ).
Find the real thrust duration, which is fuel mass divided by mdot. This should be within 1% of your stated thrust duration; if it is then the average acceleration value is accurate enough to use.
If you have a known spacecraft (known dry mass and fuel mass, known thrust), you can use thrust divided by (dry mass plus half the fuel mass).
Electric tug design
To align with the chemical tug, let's target a payload of 40 tons from LEO to EML1. Note that EML2 is a better target, but for purposes of comparison I'm using the LEO to EML1 trip as the most costly trip in the set. As mentioned above, we need to deliver in 28 days or provide an average acceleration of 3.22 mm/s. I don't have an exact solution, so I can't solve the problem in a single step. That's fine; spacecraft design is an iterative process.
Let's assume an electric thruster at Isp = 6000 and mission dV of 7000 m/s. Also assume a one-way trip (meaning fuel is available at both endpoints). Power alpha is assumed to be 18 kg/kW, whether that be nuclear or long-life solar. Thrusters will be the NuPIT design shown in the last post, using the design values for the 5 N, 200 kW unit at 2.75 kg/kW (550 kg per thruster).
As a first guess let's try eight thrusters, 1.6 MW. That's 33.2 tons, for a dry mass without tanks of 73.2 tons. We will need approximately 10 tons of liquid water propellant; using a tankage fraction of 2% would be reasonable in this case, so tack on 200kg for tanks for a total dry mass of 73.4 tons. Actual propellant load is 9,273 kg, so tankage is sufficient. The half-fueled mass is 78,037 kg and approximate average acceleration is 0.513 mm/s. We're not even close. Trip time would be 157.9 days, or 2.3 one-way trips per year.
Maybe 20 thusters / 4 MW? Power alpha would improve to about 15, yielding 71 tons of power and propulsion. 40 tons of payload and perhaps 0.4 tons of tankage gives a dry mass of 111.4 tons, fuel mass of 14.1 t and average acceleration of 0.844 mm/s. This is clearly not going our way. Trip time would be 106.3 days, or 3.4 one-way trips per year.
Let's aim much higher, 50 thrusters / 10 MW. Power alpha would continue to improve to about 14, yielding 167.5 t of power and propulsion. 40 tons of payload and 0.6 tons of tankage gives a dry mass of 208.1 tons, 26.29 tons of fuel and an average acceleration of 1.13 mm/s. Trip time would be 71.7 days or 5.1 one-way trips per year.
Clearly, short trip times require increasingly absurd power levels. Matching the payload size of a chemical thruster with the 1.6 MW version means only making one round-trip per year. In fact, looking at that version of the ship, if we eliminate the payload entirely the highest acceleration the ship can make is 1.2 mm/s on its last gasp of propellant. Since fuel mass, dry mass, power and thrust are all linear relationships* that means no matter how we scale up the ship it can never get better than this. (The power system alpha does actually get better as we scale up, but moving a ship that masses several times your payload is inefficient and extremely expensive.)
One thing we can do is increase the thrust of each propulsion unit, which usually means decreasing the Isp significantly. Let's look at a VASIMR thruster for comparison, since I have some data on performance at different Isp levels handy. A VASIMR thruster at 200 kW and 6000 Isp produces about 4.75 N of thrust, a fairly close match to the NuPIT. We need about six times that thrust (28.5 N), which occurs right at an Isp of 1000. That would bring the 8-thruster 1.6 MW vessel up to about 230 N of thrust. However, dropping the Isp so dramatically brings the fuel fraction just over 50%. That pushes our dry mass up to 75t, fuel mass to 78.1t and nets us only 2.0 mm/s average acceleration. It's a 40.5 day trip or 9 trips per year, but now we are burning more fuel than the chemical tug thanks to our drastically higher dry mass. Still no net benefit to be had.
Putting the tug to work
Let's look at what an electric tug actually saves: propellant. In a fully functional ecosystem of cis-lunar services propellant is fairly plentiful. The speed, convenience and throughput of chemical vehicles far outweighs the efficiency of ion vehicles in this environment. Where an electric tug shines is in the buildup phase, where all of the propellant is coming from Earth. The tug would save money during a critical part of the project. What that means is we do not need to survive dozens of Van Allen belt transits over two decades, we just need to make a reasonable number of trips over two or three years. We also don't need to standardize on the same payload sizes as the chemical tug, nor do we need to make trips in 1 month. I would say that using the same power system alpha for the solar version as I do for the nuclear version is very pessimistic; these vessels would not need to function at Mars orbit, though they do need significantly thicker front-glass shielding on the panels than other craft.
So, a lunar ISRU plan would still start with a single chemical tug / lander as described in part 1. Using performance for the detailed reference tug, a 15-ton package can be delivered from LEO direct to the lunar surface. This will be 12.4 tons of ISRU equipment and 2.6 tons of spares (2.1 year supply). Refilling tug 1 will take 6 months, after which it can deliver 33 tons to EML1.
In the meantime, an electric tug (call it tug A) will deliver a 9-ton fuel depot (135 ton capacity) to EML1. Let's use our 40 N / 1.6 MW / 33.4t / 6000 Isp vehicle from above. It does the job in about 92 days, which means there is a window of three months after the launch of the first ISRU package to get the 33.4t tug, 5.36t propellant and 9t payload into LEO.
At the first lunar launch, 33 tons are delivered to the EML1 depot. Tug A will collect this and head to LEO, taking 127 days and consuming 7.45t of water. During this trip a LEO depot is launched, identical to the one at EML1. The tug turns back around and heads for EML1, taking 4.22t of water for the return trip and leaving 21.33t of cargo in LEO. This could be a mix of surface samples and water as desired. Let's assume five tons are samples and the rest is fuel.
The return trip takes 72 days, during which tug 1 will have delivered another 33 tons to the EML1 depot. Tug A repeats its performance, returning to LEO with a full load of 23.78t water and another 5t of samples. At this point we are at 598 days elapsed since start of ISRU operations, which should be enough time to settle on and construct additional hardware to expand the lunar surface capacity.
This is significantly longer than the all-chemical scenario and has an IMLEO of 129.71 tons, within a few tons of all-chemical. Hardware costs are higher since more of the mass is spacecraft and much less of it is fuel. The main benefit is that schedule pressures are greatly reduced; final design, construction and testing of the second round of ISRU plant is allowed more than a year and a half of time rather than two months. More operational data is available and the tolerance for mistakes or inefficiencies is higher. Another benefit is that this profile includes depots in LEO and at EML1; even if things do not progress beyond the first ISRU package the infrastructure is still useful for this and future projects.
This baseline hardware could continue to deliver 21 tons of cargo to LEO every ~200 days for about a decade, eventually reaching 426 tons over 20 trips at a cost of 141 tons of Earth mass or a leverage of about 3 to 1. Things improve if we continue to expand, since about 44% of that mass was fuel to get the first ISRU plant in position; additional ISRU hardware is delivered using lunar propellant.
The next phase would be to send more ISRU hardware. Tug A can pick up 33 tons at EML1, deliver 19.18t of net payload to LEO over 127 days, pick up a 17-ton package and head to EML1 in 109 days. All of the required propellant is lunar and picked up at EML1. Round trip time is 236 days (a bit under 8 months). The harvesting process run by tug 1 has a shorter turnover time of 6 months, so on average an extra 19 tons is accumulated at the depot. That's not quite enough to provide for a cargo landing, so tug A may not always be bringing a full load of cargo to LEO (meaning shorter round trips in practice).
An alternative might be to use 12-ton packages that will fit into a Falcon 9 for cheaper launch costs; the delivery time for that is 98 days. If less cargo is returned to LEO then that trip time can be shortened as well; for example, 6 tons of return cargo plus round-trip fuel would make each leg of the trip take 98 days, or 196 days round-trip. Each 6.5-month trip would deliver another 10 tons of ISRU with two years of spares. Two electric tugs could deliver 80 tons of ISRU capacity in 26 months, roughly a single Mars synodic period. That would place 95 tons of ISRU with expected output of 950 tons of propellant annually at a cost of 9.5 tons of spares. Net propellant delivered to EML1 would be 505 tons annually, or could be 168 tons to LEO annually with chemical tugs. The annual demand for spares (both ISRU and depots) can be met in a single hardware run with minimal fuel costs, leaving 3/4 of the electric tug schedule open for assignments like delivering new chemical tugs or GEO debris retrieval (a mission that avoids the majority of the radiation belts and prolongs the tug's useful life).
The total phase 2 IMLEO would be 134.4 tons, all of it hardware. Lunar mass to LEO during this period would only be another 48 tons since capacity is focused on buildup. This phase would run for 26 months, or a total of 46 months since first launch.
Ongoing maintenance would require approximately 12 tons per year. The initial depots would be insufficient, so we need another 27t of hardware for fuel storage. If we rate all flight and depot hardware with a 10-year lifespan and pro-rate the replacement mass then we need an additional 12.2 tons annually (24.2t total). Depending on how the output is allocated, this could be considered an ongoing leverage of 23.5 tons in EML1 per ton IMLEO or 7.8 tons in LEO per ton IMLEO. Another way to look at it would be as a fuel supply for three manned Mars missions covering four synodic periods (104 months), or a full ISRU program length of 150 months (12.5 years). Overall Earth mass to LEO is then 511.15t to harvest 5,501.7 tons of gross lunar propellant, yielding 2,924.6 tons net lunar propellant at EML1. That's a gear ratio of about 5.7 to 1. If you are only interested in delivering fuel to LEO then you can net 972.9 tons, still a favorable 1.9 to 1 mass ratio. 511 tons is a lot of mass to launch, but only three payloads require a heavy lift vehicle: the initial chemical tug stack (62t fuel and 22t hardware, split across two Falcon H) and the two electric tugs (33.4t each, also requiring a Falcon H unless they can be built in parts and flown on two Vulcan launches). The remaining 360 tons would be delivered by 30 Falcon 9 launches, or by some combination of any price-competitive launchers with at least 12 tons of payload.
Launch costs would be roughly $2.1 billion. Hardware would run another $6.7 billion (at $15m per ton). Operations might cost $125-$250 million. Call it a total of $9 billion over about 15 years (12.5 years of operation plus 2.5 years of r&d, manufacturing and testing). Overall cost of fuel at EML1 would be $3,094.44 per kg, about $3.1 million per ton and expected to decline to $0.9 million per ton in the long run. Savings are about the same as the all-chemical approach, a bit over $4.5 billion vs. NASA baseline. Additional savings could be realized by using the chemical tugs as cargo haulers to and from Mars as described in part 2, resulting in excess capacity that could be sold or used for other purposes. One of those purposes might be ISS reboost and water supply for life support. Another might be developing a significant water supply on the Moon for growing food, in support of manned missions.
We suited up and cycled through
the Can’s (Jupiter space station) main lock. The vehicle
bay is just outside the lock, but the
bay isn’t a particular room you can
point at—it’s simply a big open
space in the hollow part of the Can.
All the small-sized vehicles are kept
there and secured with elastic tie
lines, to be sure they don’t bang
into each other. All along the inner
face of the Can are slots for
berthing; when a vehicle needs to be
fueled or worked over, it is pulled
into a berth. Otherwise it’s moored
a good distance from the Can’s
skin, in high vacuum that does it no
harm.
Jenny and I clipped on to the
mooring lines and pushed off. After
a moment of coasting I turned so
my feet pointed toward the shuttle
and squirted my attitude jets. That
slowed me to a crawl and I undipped
from the line just as the shuttle
swelled up to block my view of the
opposite inner wall of the Can.
I swung around, found a pipe and
attached my own suit tie line to it.
The shuttles are all different: each
one was thrown together with
whatever spare parts came to hand.
The Roadhog—I’d silently christened
it the moment my glove
touched the pipe—looked like a
conglomerate of castoffs until you
studied the structure.
It was a bit like an automobile
chassis, all bones and no skin. The
pilot was belted into a couch at the
center. He was surrounded by pipes
and struts and fuel tanks, without
really obscuring his view. A small
ion engine was mounted behind
him. The whole thing was lumpy
but balanced; spacecraft have to
be stable.
I glided over to the pilot’s couch
and perched on top of the back rest.
Around us, never closer than
twenty yards, were other craft. A
few had their running lights on;
they were being checked over or
preparing to go out. A big tubeshaped
cargo hauler was moored
right above us, shutting out the
view through the bore of the Can.
Below I could see stars, one of them
a sharp, fierce blue diamond.
I heard a faint clank as Jenny
bumped into the shuttle. She secured
her suit safety line and came
swarming over to me.
She touched helmets. “You know
how to use the air tanks on this one,
don’t you?”
“Sure,” I said. “Take us over there, then,” she
said, pointing to Berth G.
I buckled myself into the pilot
couch and reached out gingerly for
the controls. You don’t use an ion
engine inside the Can’s bay, or even
nearby if you can help it. The
backwash can knock a man head
over heels a hundred meters away
or snarl mooring lines. So I gently
thumbed in the override on the
shuttle’s air tanks, switched them
over to the pipe system that led to
the little maneuvering jets at the
rear, and reached for the release
button.
“Oh.” I felt my face go red. I unbuckled
and glided around the eight
corners of the Roadhog, unhooking
the elastic lines. They’re on
retrieval coils, so as soon as I let go
a line it retracted toward the Can
walls.
I sat back down in the couch.
“All cleared, Captain.”
She didn’t say anything. I carefully
bled a little air into the pipes
and felt a satisfying tug as we got
underway. I gave us little bursts of
air to maneuver around the cargo
hauler overhead, and cut in the
gyros to keep us from tumbling.
We inched our way across the
bay. I got back into the practice of
looking three different directions at
once; my neck started to ache.
Human beings are built for
navigating in two dimensions; our
eyes are set in a line parallel to the
ground. Outer space takes some
getting used to. Even after you’ve
trained your stomach to stop
pushing the panic button when
you’re in no-gee conditions, you
have to keep reminding yourself
that up and down are just as important
as sideways. The adjustment
is never perfect, because
you’re trying to learn a set of reflexes
our bodies just weren’t programmed
to take. That’s why nogee
maneuvering takes a lot of
energy—you’re fighting yourself,
all the way, whether you know it or
not. I suppose that’s why kids like
me are a little better at no-gee work
and don’t tire so fast; our reflexes
aren’t totally “set” yet.
Berth G was a square-mouthed
tube with bright lights lining the inside.
I edged the Roadhog into the
slot and brought us to a stop nearly
perfectly; we couldn’t have been
moving faster than a foot per
second when we bumped into the
buffer pads at the end.
Jenny patted me on the shoulder
and bounded away to fasten
mooring lines.
I felt good. I had proved that I
could still handle a shuttle craft, despite
being out of practice. And
most of all, I was out in space
again. It had been too long.
That was the high point. The next
five hours were something less than
gratifying. Jenny took me over the
Roadhog inch by inch, making me
learn every valve and meter and
strut on the contraption. I had forgotten
a lot; the rest I hadn’t known
at all.
She made me draw a flow chart
for the air pipes, after letting me inspect
the Roadhog for five minutes.
I thought I’d figured it out. When
she handed the clip board back to
me, covered with red marks, I
found out that I had gotten
everything exactly backwards.
I checked out everything. Gyros,
radio, first aid, fuel feeds, hauling
collars, repair kit, spare parts.
search lights, electrical system,
navigation, backup systems, vector
integrator—you name it, I had to
find it, see if it worked, explain how
I would repair it if it didn’t, and
relate it to all the other systems it
meshed with.
We coasted into Berth G, freed
the lines and Jenny gracefully
swung into the pilot’s couch. She
called in to the bridge and had an
updated flight plan transmitted into
the shuttle computer’s memory.
Then I took over. I touched the fuel
and oxygen gauges meaningfully, to
prove I didn’t trust anybody’s word
about that—like any good pilot—and ran quickly through the standard
checklist. Jenny sat on the flat
bench next to the couch, buckled
herself in and gave me the high
sign.
I backed us cautiously out of the
berth and brought the nose up to
point at the circle of stars overhead.
I gave Roadhog one burst of air
through the rear jets and we coasted
for the top of the Can in one long,
clean straight line.
We glided by the black shapes of
parked craft and past the curved
skin of the Can. A few viewports
passed—they glowed with soft light
and at one a woman looked out on
the bay, smiled and waved. About
150 meters away in the opposite
direction was the stubby cylinder
at the axis of the Can, where
the squash court and some hydroponics
sections were. Behind us was
the Far Eye, a little white dome at
the tip of the central cylinder.
The circle of stars grew as we
rose toward the top of the Can. We
passed the Sagan; thick hoses
sprouted from her water tanks and
led into several sockets in the Can
skin. Jupiter peeked over the rim
and quickly grew as we cleared the
top of the Can. It was a crescent;
the Can was moving sunward in its
orbit.
The shuttle shifted and murmured
under me. The computer
program was taking over. I
punched the release button on the
small control board and instantly
felt a slight thrust. The ion engine
had cut in. It made no noise; it’s a
low-impulse system.
We went straight up, away from
the Lab, as though the Can was a
cannon and we had been shot out of
it. I was looking at Jupiter through
the spaces in the Roadhog s floor.
“What’s the radiation level like
during the storm?”
“High. Higher than they’ve ever
seen before, Astrophysics says.
Why, worried?”
“Yup. I’m too young to be
broiled in an electron shower. Are
the shielding fields on?” I looked at
my control panel.
“Yes, they went on automatically
when we left the Lab. Don’t
worry.”
“Don’t mind me, I’m a natural
worrier.” I looked around at the
superconducting bars that ring the
Roadhog, though of course you
can’t see the magnetic fields they
produce. Those bars were all that
kept Jupiter’s Van Allen belts from
frying us alive.
Radiation is a subtle thing. You
can’t see it or taste it, but those little
electrons and protons are better
killers than a tiger. They are why
the Lab wasn’t orbited in close to
Jupiter, within the orbit of Io.
Earth and Jupiter have one big
thing in common: radiation belts. A
man named Van Allen discovered
them back in the early Space Age,
around Earth. A little later Jupiter
turned out to have them, too. Mars
doesn’t, or Venus, or Mercury.
Reason: no magnetic fields. Earth
and Jupiter generate big magnetic
fields around them, and those fields
trap high-energy particles that the
Sun throws out.
They’re called belts because
that’s what they look like—big donuts
around Jupiter and Earth,
seven or eight planetary radii in
diameter. The Lab had to be
located out beyond that donut or
we’d be fried with radiation.
Even as far from Jupiter as it is,
the Can still has superconducting
magnets all around the rim to deflect
away charged particles—that’s
what radiation is—because the
outer edge of the Van Allen donut
isn’t sharp, and a lot of deadly
particles are still around, even that
far from Jupiter.
Why don’t Mars or Venus or
Mercury have magnetic fields? My
father tells me a planet has to do
two things to produce them: first,
have enough mass to squeeze its
core until the metal inside melts.
Second, rotate fast enough to churn
the molten iron and nickel around.
That forces electrical currents to
flow, which makes a magnetic field.
But Mars and Mercury just aren’t
big enough to squeeze their cores.
Venus is, but it hardly rotates at all.
Which is a shame, really. Mars
might have been a decent place to
live if it had those fields. Van Allen
belts are filled with charged particles
that didn't hit the planet; the
magnetic fields deflect them away
from the atmosphere and into a
sort of magnetic bottle that keeps
them away from the planet’s
surface.
Earth has that; it’s safe for vulnerable
human beings to walk
around on. Jupiter has it; that’s
another reason to think life can
make a go of it there. Mars hasn’t,
and Martian life never really had a
chance; it was pelted from the start
with every bit of garbage the sun
throws out.
The International Space Agency
knew all this before they ever raised
an expedition to Jupiter, of course;
the Can is quite well equipped to
deal with radiation. The Roadhog
was a slightly different matter. It
carried superconductors that could
keep off medium-intensity radiation,
but it couldn’t stop the big
stuff that crops up during radiation
storms. The Can, after all, gets a lot
of help from sheer mass—the Lab
water tanks line the outside of the
Can and stop incoming particles before
they can reach the living
quarters.
The Roadhog hasn’t got that
mass. It’s a shuttle, engineered for
speed and economy. So you don’t
go out in it during radiation storms.
Extra mass might have stopped
the pellet that killed Ishi. Maybe
there was an argument for putting
shielding around the shuttles. Magnetic
Helds don’t affect pieces of
rock, because the rock is electrically
neutral; only encasing a shuttle
in heavy walls would make it
really safe.
Artwork by Don Davis for "Icarus Descending" (1973). In the story the tug is delivering a large nuclear device (helpfully labled "DANGER") in order to divert the asteroid Icarus from a collision with Terra. Note the shields preventing the plume from the attitude jets from damaging the hull.

 A space tug is a tiny spacecraft with over-sized engines and some means of grappling another spacecraft. If the tug pushes its cargo,it will have a massive push plate on its bow, with a core of structural members to transmit the thrust of its engines to the push plate. If the tug pulls its cargo, it will have cables and winches on its stern, and the engines will be vectored to fire backwards at an angle so it does not torch the ship it is dragging. The engines will suffer a reduction thrust penality proportional to the cosine of the engine angle.
A space tug is a tiny spacecraft with over-sized engines and some means of grappling another spacecraft. If the tug pushes its cargo,it will have a massive push plate on its bow, with a core of structural members to transmit the thrust of its engines to the push plate. If the tug pulls its cargo, it will have cables and winches on its stern, and the engines will be vectored to fire backwards at an angle so it does not torch the ship it is dragging. The engines will suffer a reduction thrust penality proportional to the cosine of the engine angle.
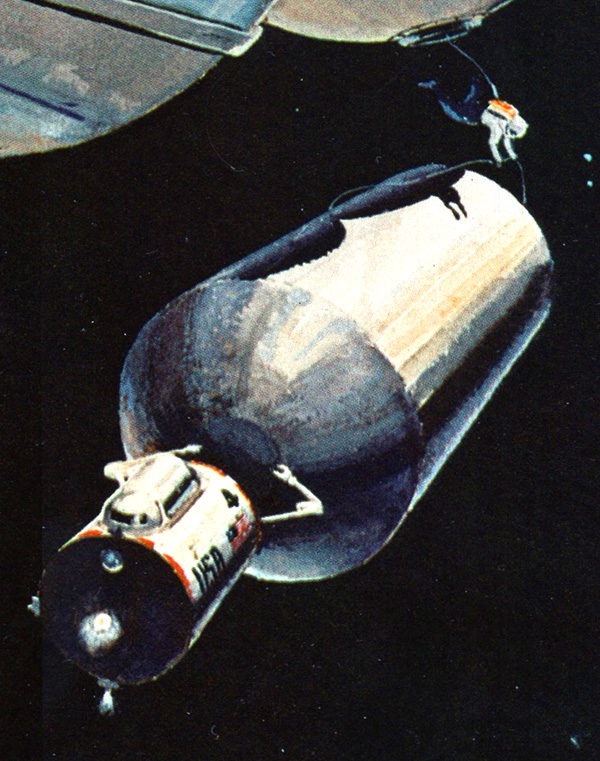


















































































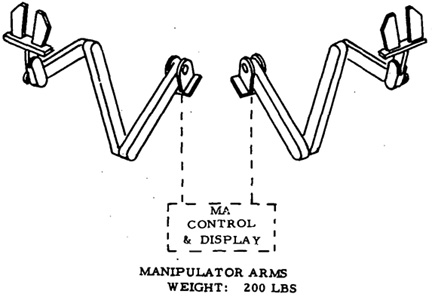











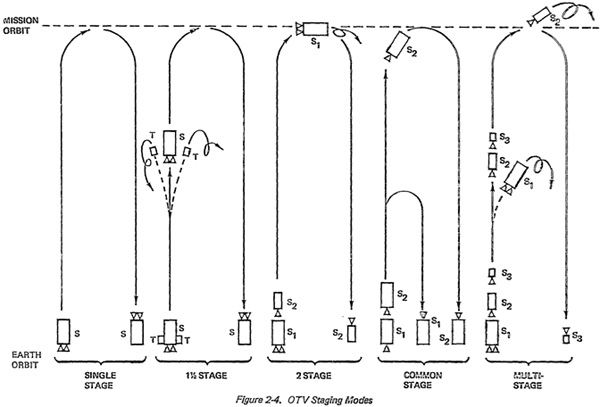




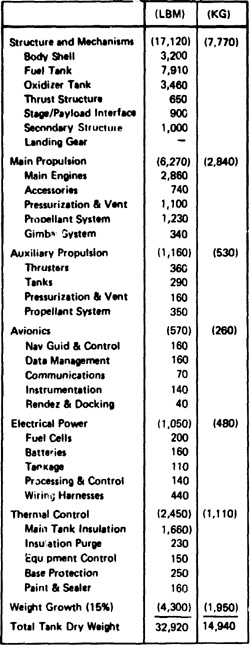


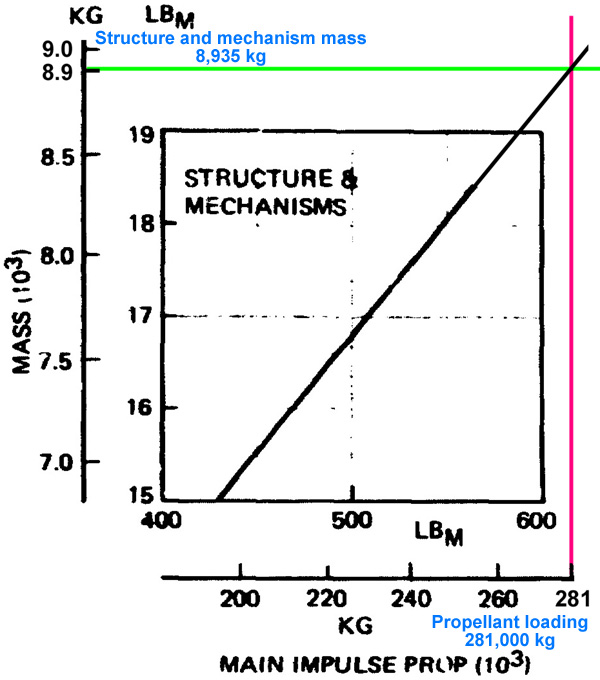



































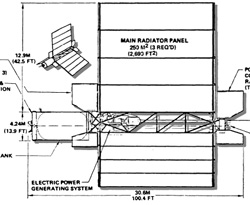

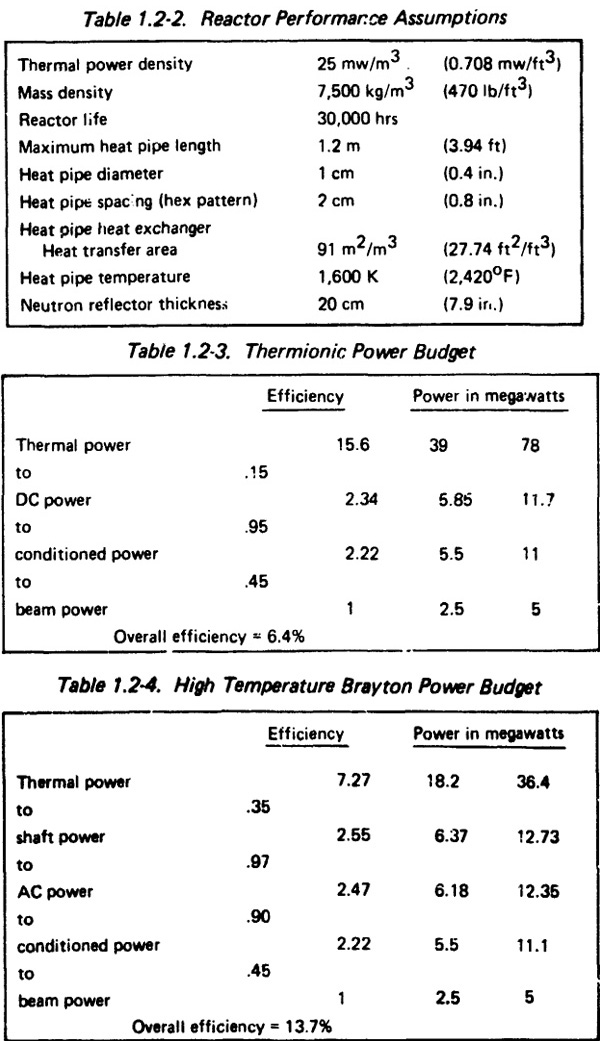





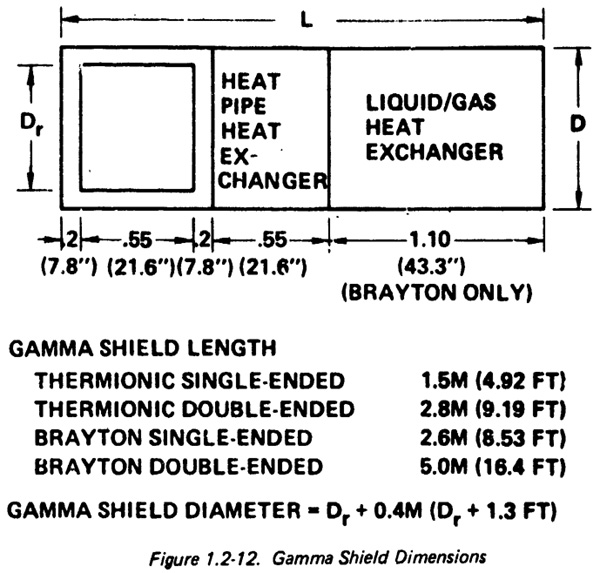

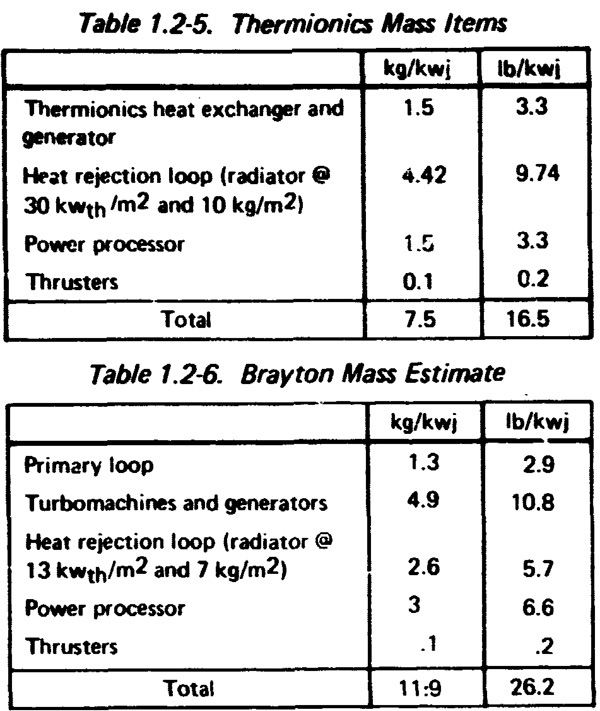









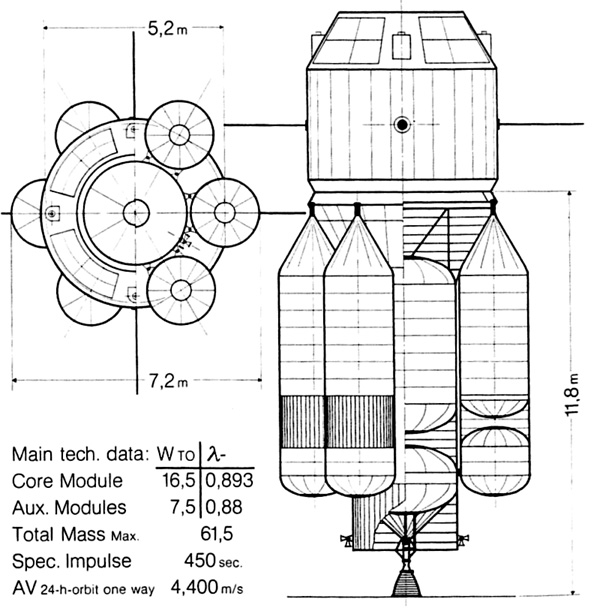






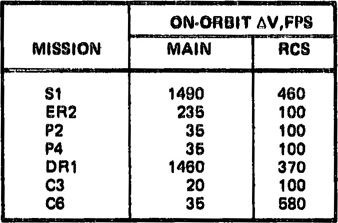




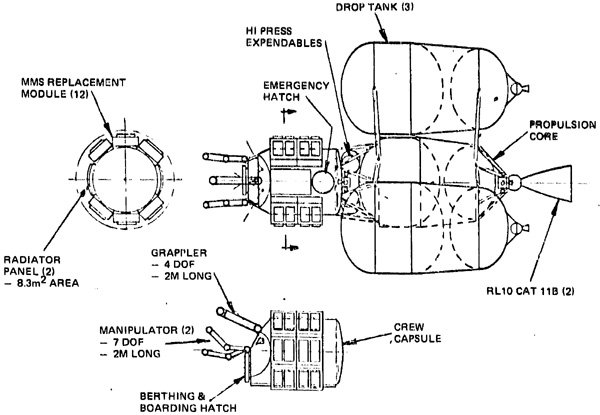

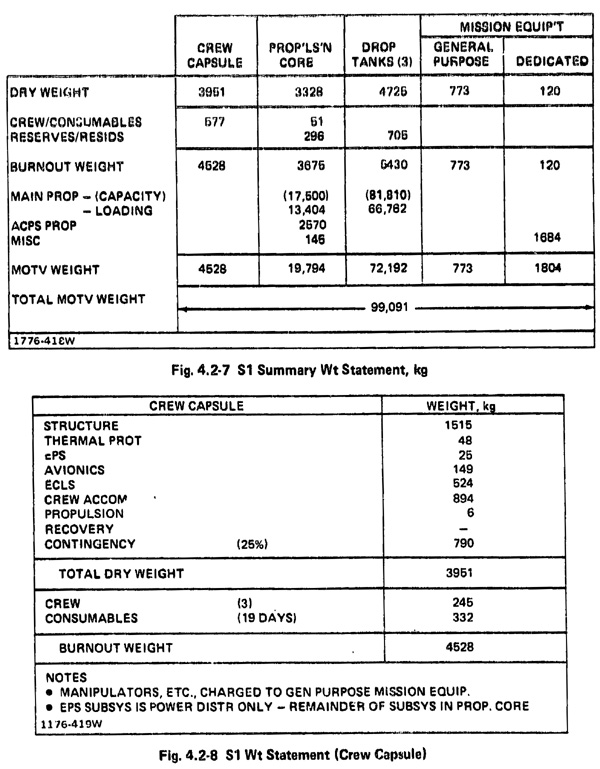






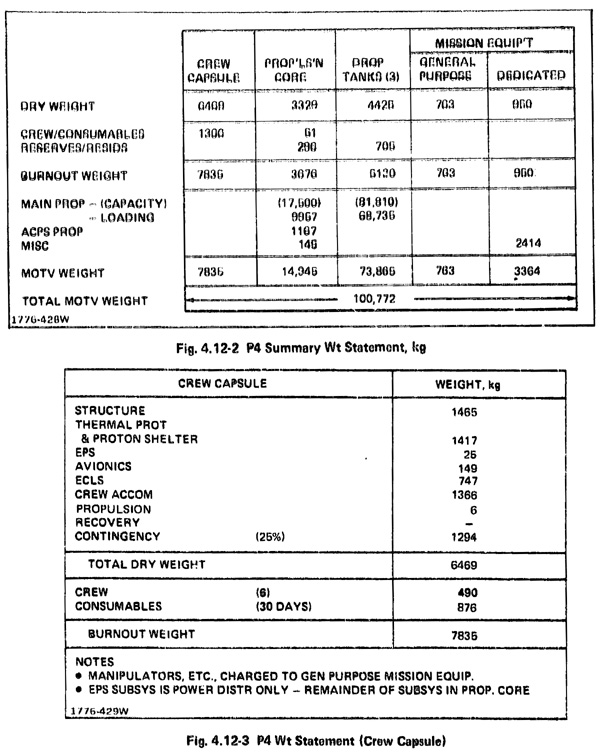




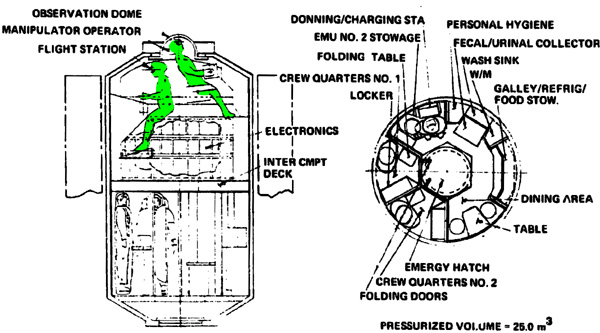
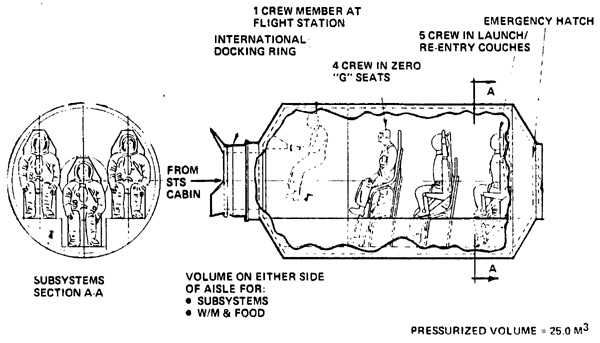

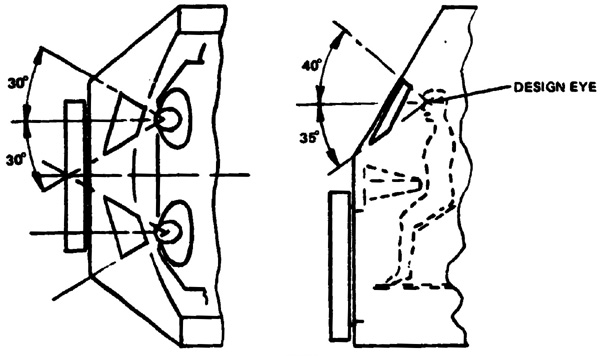

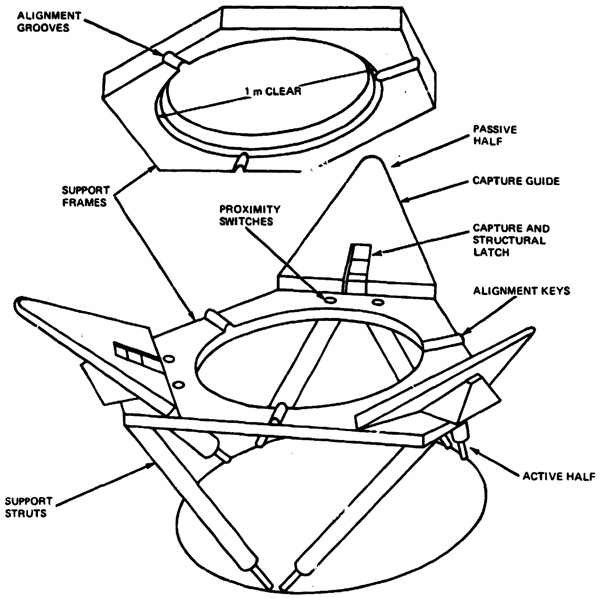




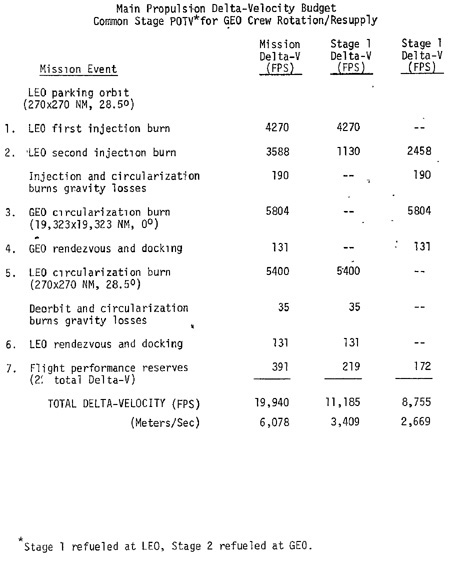













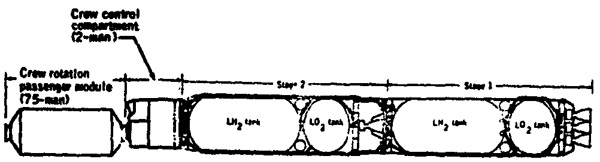









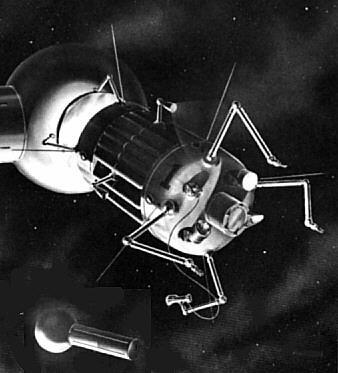






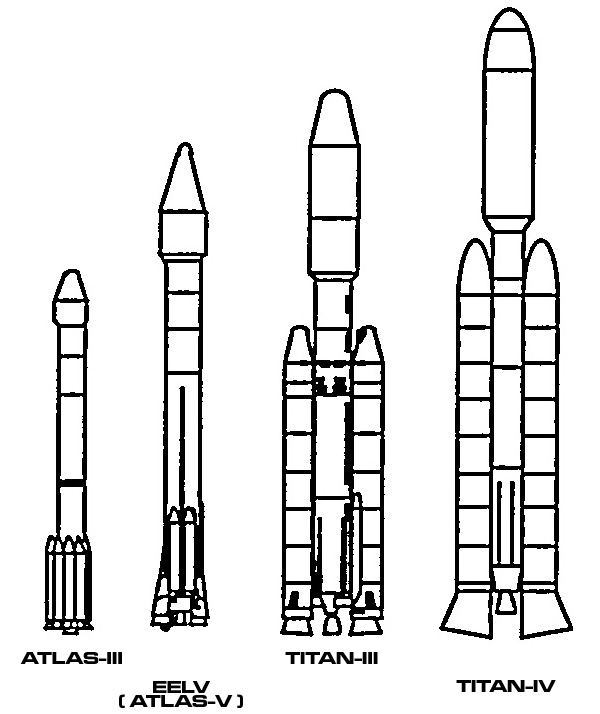
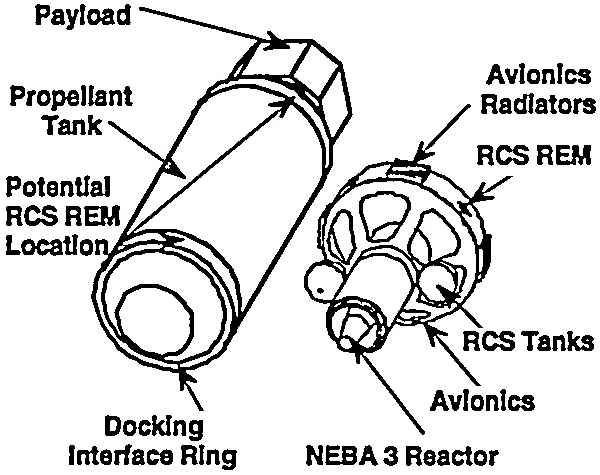

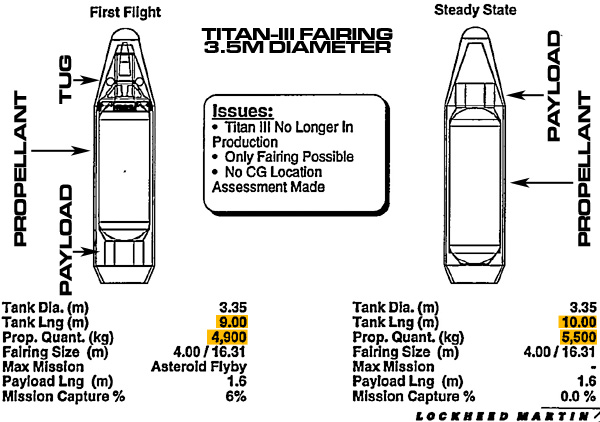





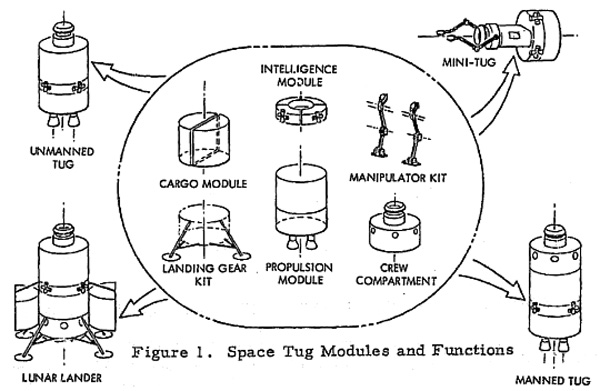
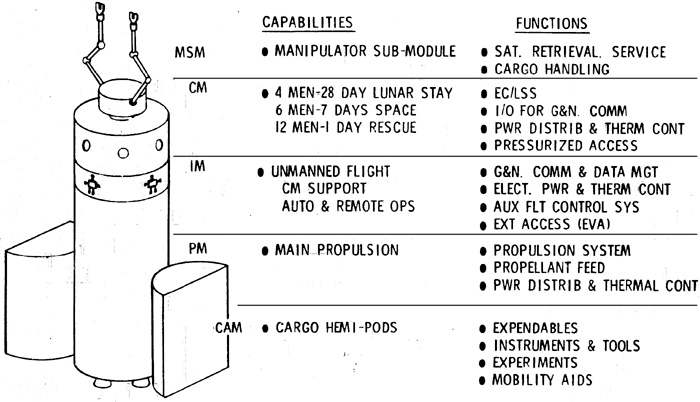







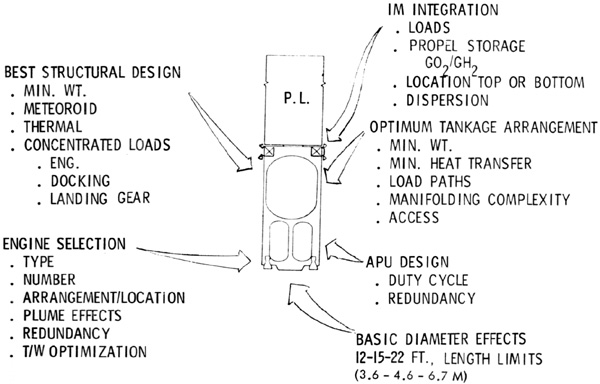
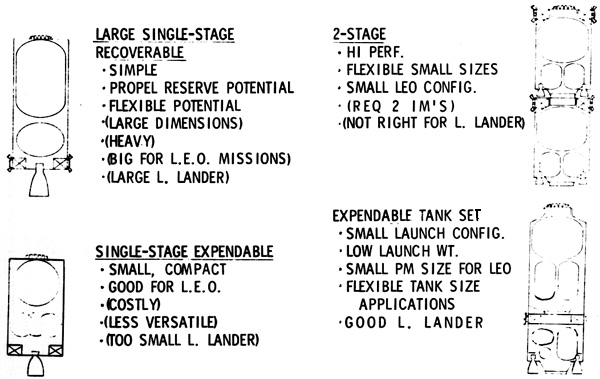
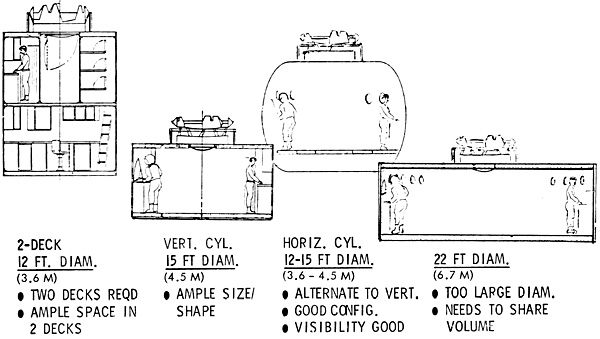


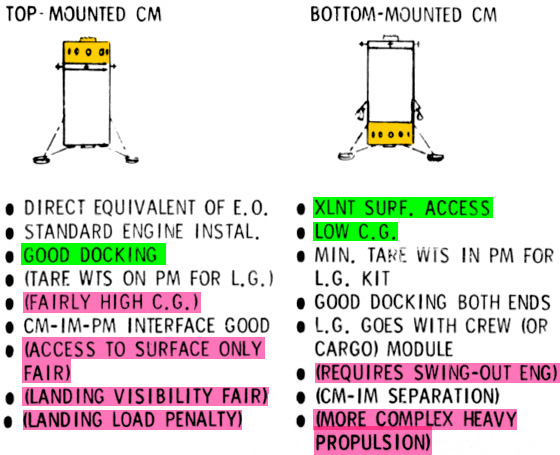










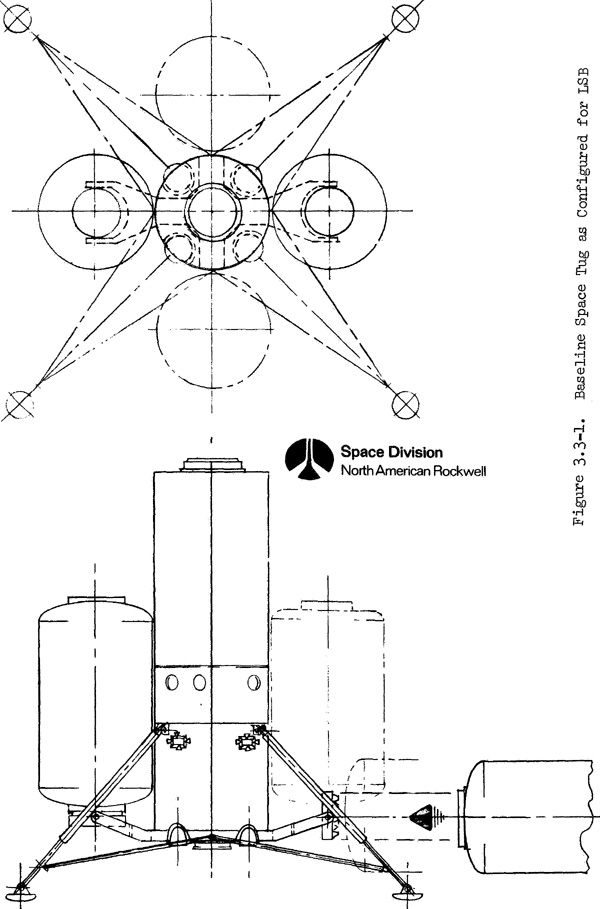



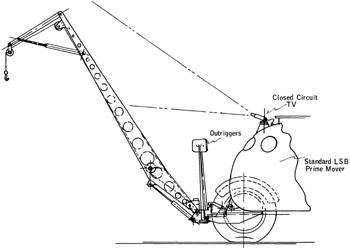
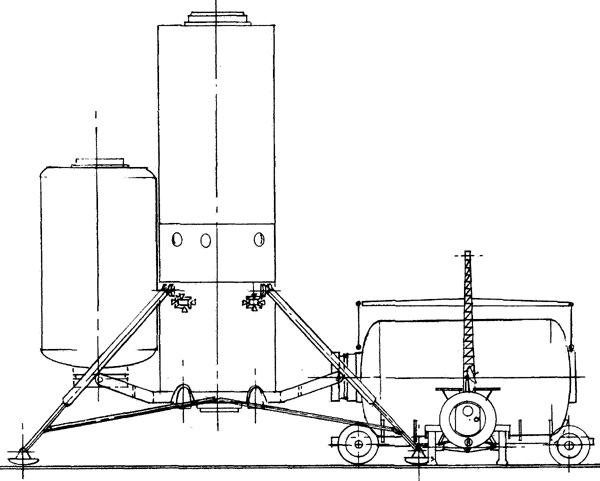


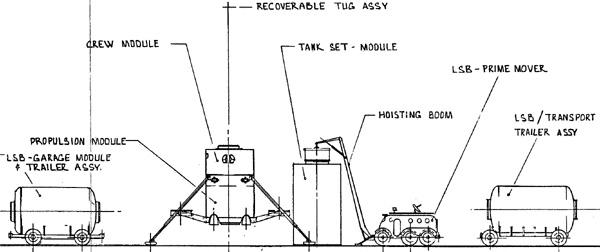


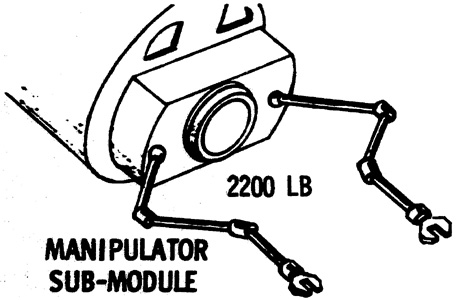





















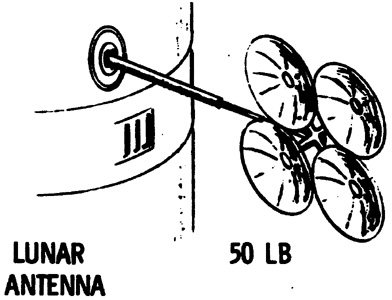






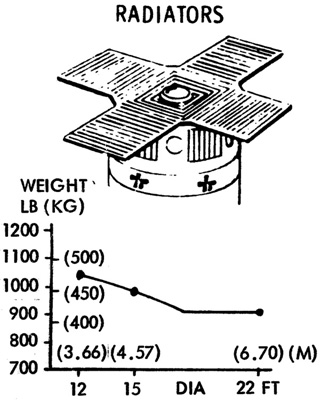

























































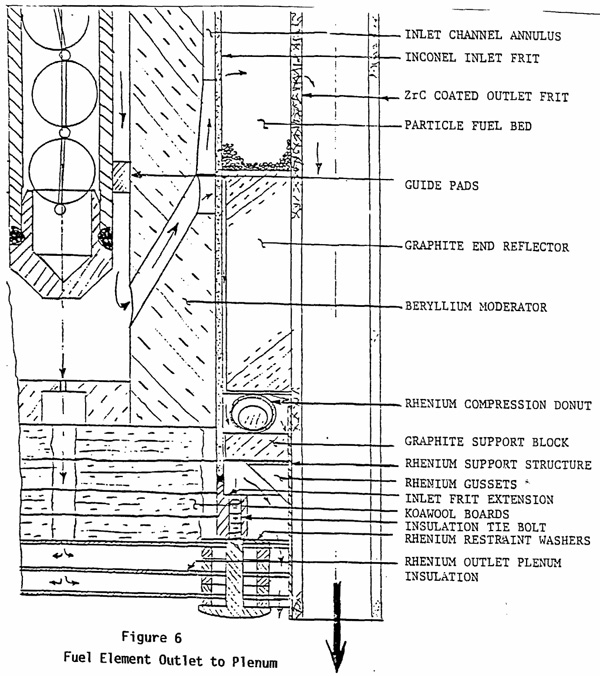




















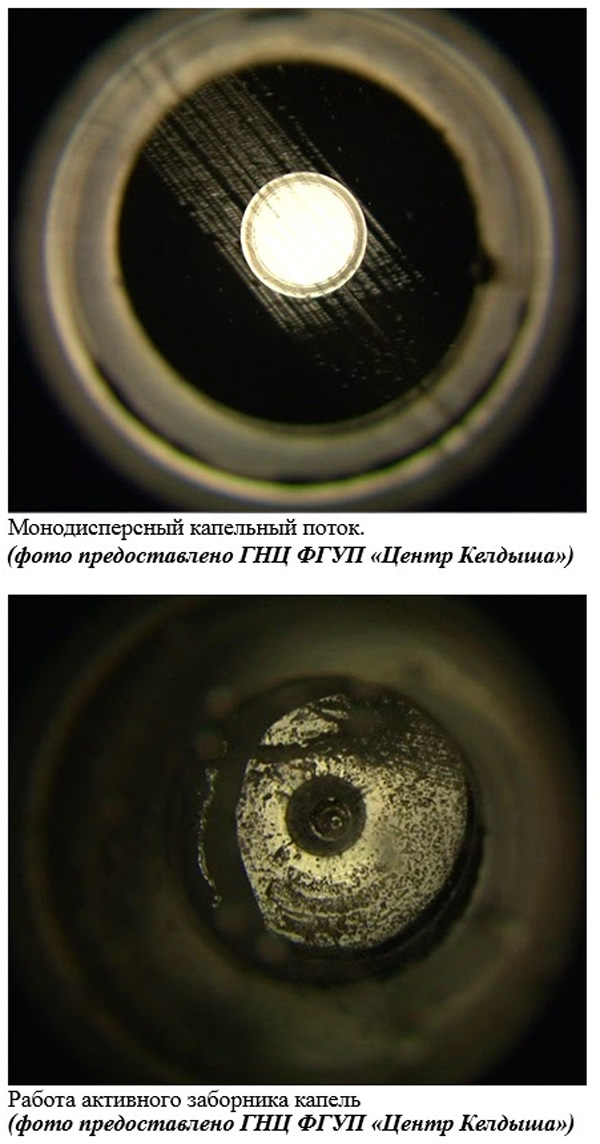








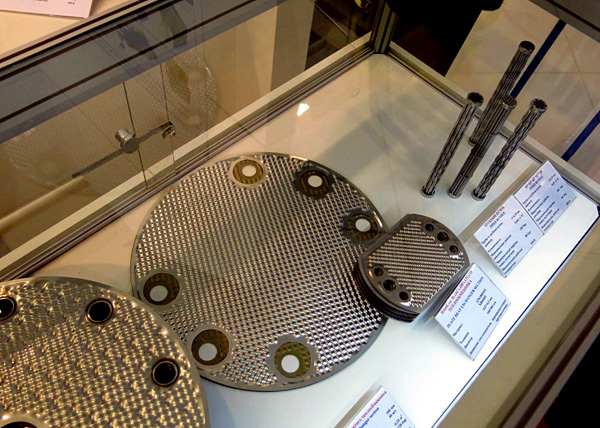


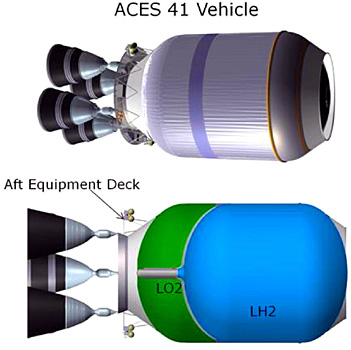


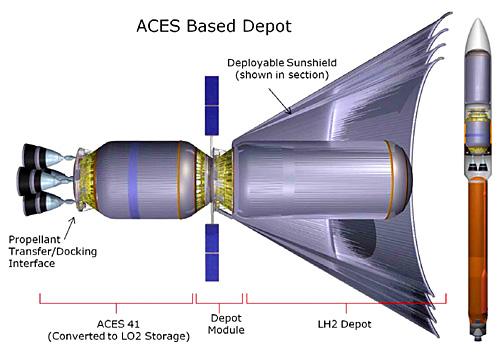


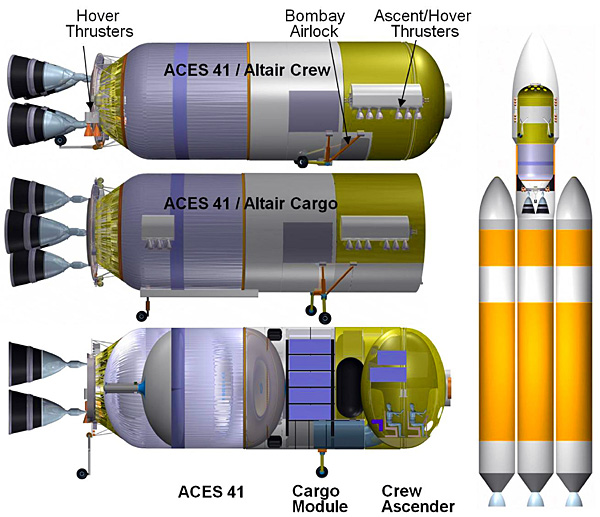











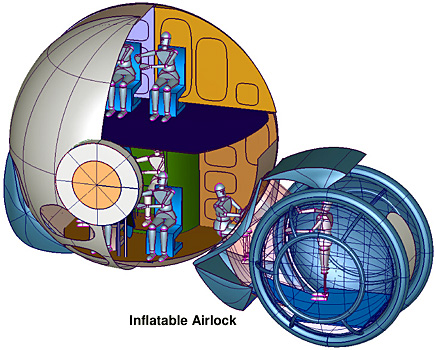






{kind=link}
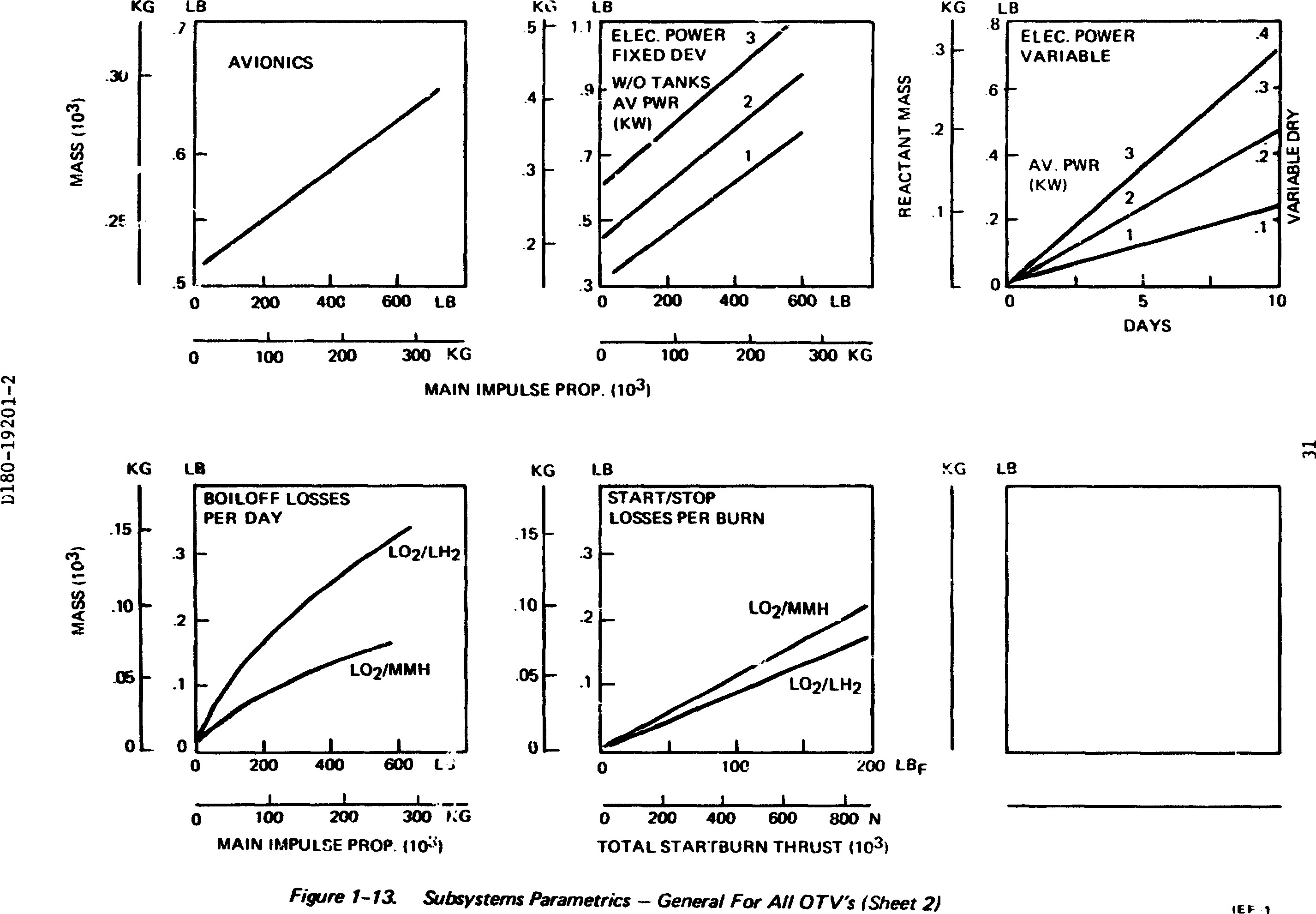{kind=link}
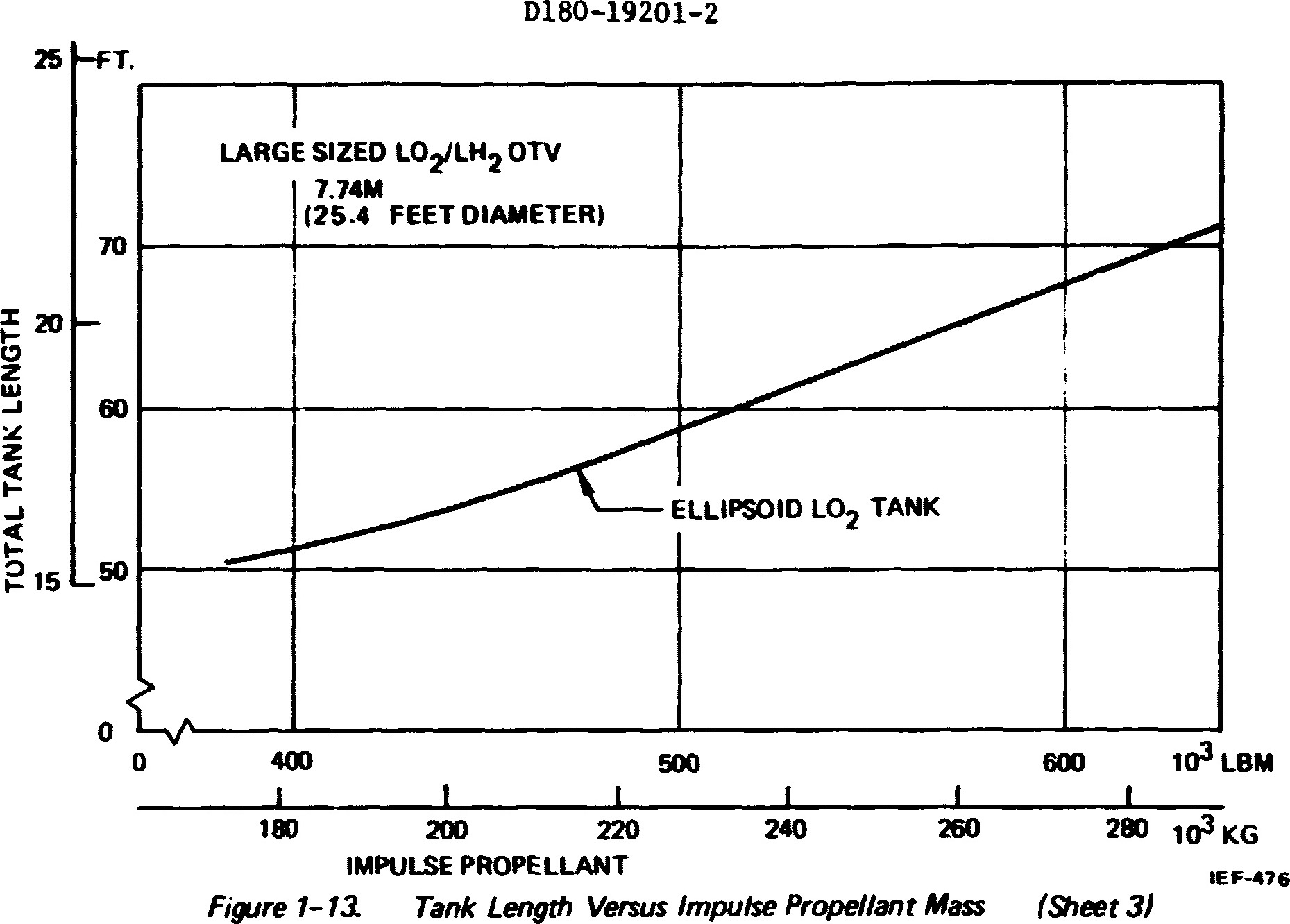{kind=link}
